Дипломная работа: Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом
Міністерство освіти і науки України
Вінницький державний технічний університет
Інститут автоматики, електроніки та комп’ютерних систем управління
Факультет автоматики та комп’ютерних систем управління
ЗАТВЕРДЖУЮ
Зав. кафедри МПА ВДТУ,
д. т. н., професор
___________ В. О. Поджаренко
"___" _______________ 2009 р.
КОМП’ЮТЕРИЗОВАНА ВИМІРЮВАЛЬНА СИСТЕМА ПАРАМЕТРІВ ЕЛЕКТРИЧНИХ МАШИН З ГАЗОМАГНІТНИМ ПІДВІСОМ
Пояснювальна записка
до дипломного проекту за спеціальністю
7.091401 – Системи управління та автоматики
08 – 03. ДП. 003. 00. 000 ПЗ
Керівник проекту
к. т. н., доц. П. І. Кулаков
"___" ____________ 2009 р.
Розробив студент гр. 1 АМ – 09
В. І. Козловський
"___" ____________ 2009 р.
Вінниця ВДТУ 2009
ПОГОДЖЕНО ЗАТВЕРДЖУЮ
Зав. кафедри МПА ВДТУ,
д. т. н., професор
__________В. О. Поджаренко
"___" ______________ 2009 р.
ЗАВДАННЯ
на дипломний проект зі
спеціальності 7.091401 – системи управління і автоматики
студент групи 08 - 03. ДП. 008. 00. 000 ПЗ В. І. Козловський
Тема проекту: "Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом"
Вихідні дані. Діапазони вимірювання параметрів: середнього і миттєвого значення кутової швидкості від 10 до 6500 рад/с; приведеного моменту інерції від 10-3 до 10-2 Н·м; амплітуди крутильних коливань від 10-5 до 2·10-4 рад; Відстань від первинного вимірювального перетворювача до комп’ютера – не більше 2 метрів. Визначення: середньої кутової швидкості, миттєвої кутової швидкості, приведеного моменту інерції, амплітуди крутильних коливань. Зведені похибки вимірювань комп’ютерної системи: середнього значення кутової швидкості – 1%; миттєвого значення кутової швидкості – 5%; приведеного моменту інерції –10 %; амплітуди крутильних коливань – 7 %. Результат представлення вимірюваної інформації у вигляді числового подання на екран монітора персонального комп’ютера.
Короткий зміст частин проекту
1 Графічна Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом. Схема електрична структурна. Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом. Схема електрична принципова. Первинний вимірювальний перетворювач параметрів електричних машин з газомагнітним підвісом. Схема електрична принципова. Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом. Схема програми. Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом. Складальне креслення.
2 Текстова (пояснювальна записка). Огляд аналогів розробляємої системи. Техніко-економічне обґрунтування доцільності проектування. Розробка комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом. Розробка структурної схеми. Розробка принципової схеми. Вибір елементної бази. Розрахунок метрологічних характеристик. Розробка алгоритмічного та програмного забезпечення. Електричні розрахунки. Економічна частина. Охорона праці. Цивільна оборона.
Консультанти з окремих розділів дипломного проекту:
1 Спец. частина _______________________к.т.н., доцент__________
підпис Вчений ступінь, вчене звання (посада)
_________П. І. Кулаков__________
ініціали та прізвище
"_____" ___________ 2009 р.
2 Економічна частина _______ _______________ асистент________
підпис Вчений ступінь, вчене звання (посада)
Т. К. Мещерякова_____
ініціали та прізвище
"_____" ___________ 2009 р.
3 Охорона праці _______ __________к. т. н., доцент______________
підпис Вчений ступінь, вчене звання (посада)
В. П. Якубович
ініціали та прізвище
"_____" ___________ 2009 p.
4 Цивільна оборона ________ к. т. н., доцент__________________
підпис Вчений ступінь, вчене звання (посада)
В. Ф. Сакевич
ініціали та прізвище
"____" _____________2009p.
Дата попереднього захисту проекту 17.06.2009 р.
Офіційний рецензент _______ к.т.н., ст. викл. каф. ЛОТ ВДТУ___
підпис Посада, організація (місце роботи)
М. Г. Тарновський
ініціали та прізвище
"___" __________ 2009 p.
Завдання видав керівник проекту _______ ___ к. т. н., доцент________ підпис Вчений ступінь, вчене звання (посада)
П. І. Кулаков
ініціали та прізвище
"_____" ___________ 2009 p.
Завдання отримав студент _______ В. І. Козловський
підпис ініціали та прізвище
"_____" ___________ 2009 p.
Примітка: Завдання на дипломний проект є підставою для розробки технічного завдання.
Зміст
Анотація
Annotation
Вступ
1. Огляд аналогів розробляємої комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
2. Техніко-економічне обґрунтування доцільності розробки комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
2.1 Особливості вимірювання параметрів електричних машин з газомагнітним підвісом
2.2 Проведення маркетингових досліджень
2.3 Розробка вимог до розробляємої системи
2.4 Порівняльна характеристика розробляємої системи
3. Розробка структурної схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
4. Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
4.1 Аналіз лінійного фотоприймача
4.1.1 Розробка первинного вимірювального перетворювача
4.2 Розробка пристрою спряження перетворювача з ПЕОМ
5. Електричні розрахунки
5.1 Розрахунок компаратора напруг
5.2 Електричний розрахунок генератора прямокутних імпульсів, що запускає АЦП
5.3 Електричний розрахунок лінійних фотоприймачів
6. Розробка схеми програми роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом та програмного забезпечення
6.1 Розробка схеми програми роботи пристрою
6.2 Розробка програмного забезпечення
7. Розрахунок похибок вимірювання комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
7.1 Розрахунок похибок вимірювання моменту інерції
7.2 Розрахунок похибки вимірювання кутової швидкості
8. Економічна частина
8.1 Розрахунок витрат на розробку і впровадження комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
8.2 Розрахунок виробничої собівартості комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
8.3 Розрахунок ціни реалізації нового технічного рішення
8.4 Розрахунок чистого прибутку для виробника
8.5 Розрахунок експлуатаційних витрат для нового пристрою
8.6 Розрахунок економічного ефекту на експлуатаційних витратах для споживача
8.7 Розрахунок економічного ефекту на ціні для споживача від придбання нового пристрою
8.8 Розрахунок терміну окупності витрат
9. Охорона праці
9.1 Характеристика об’єкта, що проектується
9.2 Погіршення стану здоров’я користувачів ЕОМ, які пов’язані зі стресом
10. Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин газомагнітним підвісом в умовах дії іонізуючих та електромагнітних випромінювань
10.1 Дія іонізуючих випромінювань та електромагнітного імпульсу на радіоелектронні системи
10.2 Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом в умовах дії іонізуючих випромінювань
10.3 Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом в умовах дії електромагнітного імпульсу
Висновки
Список літератури
Додатки
Додаток А (обов’язковий) Технічне завдання на дипломне проектування
Додаток Б (обов’язковий) Фрагмент програми вимірювання та контролю моменту інерції
Додаток В (обов’язковий) Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом
Перелік елементів
Анотація
У дипломному проекті розроблено комп’ютерний пристрій для контролю моменту інерціі ротора синхронної гістерезисної електричної машини з газомагнітним підвісом ротора. Розроблено високоточний первинний перетворювач амплітуди крутильних коливань та вимірювальний канал на основі аналого-цифрового перетворювача, дані з виходу якого передаються через порт до ПЕОМ, де обчислюється значення моменту інерції та здійснюється його контроль. Розраховано похибку вимірювання моменту інерції та показники достовірності його контролю.
Також у дипломному проекті проведено розрахунок економічного ефекту від впровадження пристрою у виробництво та розглянуто питання охорони праці та екології.
Annotation
In the degree project the computer device for monitoring a moment of inertia of a curl of the synchronous hysteresis electrical machine of the machine gas-magnetic hanger of a curl is developed. The precision primary converter of amplitude of torsional oscillations and measuring channel is developed on the basis of an analog-to-digital converter, the datas from which exit are transmited through a port to the computer, where the value of a moment of inertia is evaluated and its monitoring is carried out. The measuring error of a moment of inertia and indexes of reliability of its monitoring is calculated.
Also in the degree project the account of economic benefit from introduction of the device in manufacture is carried out and are considered of a question of protection of work and ecology.
Вступ
Момент інерції ротора будь-якої електричної машини є однією з найважливіших її характеристик. На жаль, вимірювання та контроль цього параметру електричних машин трудомісткий і в умовах промислового виробництва а також в процесі періодичного контролю стану електричних машин не завжди виконується.
Промисловістю не випускаються засоби автоматизованого контролю та вимірювання моменту інерції. Це приводить до відносно високого проценту браку при виробництві машин.
В теперішній час бажано мати пристрій, здатний здійснювати контроль та вимірювання моменту інерції без знімання електричної машини з місця її роботи.
Величина моменту
інерції ![]() ротора електричних машин
суттєво впливає на виміряне значення динамічного моменту
ротора електричних машин
суттєво впливає на виміряне значення динамічного моменту ![]() , оскільки останній є
невід’ємною складовою частиною під час встановлення залежності
, оскільки останній є
невід’ємною складовою частиною під час встановлення залежності ![]() і в процесі отримання
динамічної механічної характеристики
і в процесі отримання
динамічної механічної характеристики ![]() .
.
Розрахункові
методи визначення ![]() характеризуються
досить низькою точністю, тому на практиці застосовуються рідко. Найбільш
розповсюдженими є експериментальні методи : допоміжного маятника; крутильних
коливань; самогальмування.
характеризуються
досить низькою точністю, тому на практиці застосовуються рідко. Найбільш
розповсюдженими є експериментальні методи : допоміжного маятника; крутильних
коливань; самогальмування.
Суттєвим недоліком перших двох експериментальних методів є невисока точність та складність автоматизації процесу вимірювання.
Окрім того, їх не можна застосовувати при вимірюванні моменту інерції ротора електричних машин з безконтактним підвісом ротора, тому як у таких машинах використовується примусове гальмування ротору в процесі зупинки машини.
Високоточний контроль та вимірювання кутової швидкості має велике значення не тільки при випробуваннях електричних машин (ЕМ), а в багатьох випадках і під час їх роботи. Це стосується систем точних приводів, систем автоматики, у яких ЕМ є складовими компонентами, систем, у яких відбувається керування електроприводами.
Специфічною особливістю тахометрії є вимога високої точності вимірювання: в більшості випадків вимірювання швидкостей повинні виконуватись з точністю на один-два порядку вище, ніж вимірювання інших параметрів руху. В останній час ця вимога накладається ще на динамічний режим роботи тахометра, обумовлюючи ще одну вимогу - високу швидкодію.
Дуже важливим елементом вимірювального кола кутової швидкості є тахометричний перетворювач. В сучасних вимірюваннях, в основному використовуються два види тахометричних перетворювачів - частотні та амплітудні, інформативними параметрами вихідного сигналу яких є, відповідно, частота (період) та амплітуда.
Нині найточнішими вважаються дискретні методи вимірювання кутової швидкості. Вони ґрунтуються на квантуванні сигналів за рівнем та дискретизації у часі [1].
Для більшості електродвигунів, які працюють у різноманітних пристроях автоматики, системах точних електроприводів, різноманітних побутових пристроях, динамічний режим є основним режимом їх роботи. Велике значення, особливо для апаратури відео та звукозапису, систем автоматики, має високоточне вимірювання відхилень кутової швидкості електродвигуна від номінального значення.
Широке застосування математичних моделей електродвигунів обумовлює необхідність перевірки їх адекватності. Це краще за все робити шляхом порівняння розрахункової динамічної характеристики з експериментальною.
В останній час з’явилось багато наукових праць, що присвячені ідентифікації параметрів електродвигунів за їх математичними моделями, що дозволяє значно скоротити час їх випробувань. Використовуємі при цьому алгоритми обумовлюють необхідність високоточного вимірювання динамічних характеристик електромеханічних перетворювачів енергії (ЕМПЕ).
Незважаючи на те, що відома велика кількість різноманітних тахометрів, тахометричних перетворювачів, багато з яких може бути застосовано для високоточного контролю середнього значення кутової швидкості, вітчизняна промисловість таких пристроїв не випускає. Це обумовлює необхідність розробки високоточного пристрою для вимірювання та контролю середнього значення кутової швидкості.
1 Огляд аналогів розробляємої комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Вирішення проблеми підвищення продуктивності механізмів та машин, що нерозривно пов’язане з проблемою підвищення швидкості робочих органів механізмів, провідні фірми світу знаходять у використанні безконтактного підвісу роторних систем. Відомі три типи безконтактних підвісів роторних систем - газовий, магнітний, газомагнітний. Порівняльна характеристика трьох типів безконтактних підвісів дозволяє оцінити їх переваги та недоліки, перспективність подальшого розвитку, вибрати об’єкт контролю.
Широко розповсюдженим типом безконтактного підвісу роторних систем є газовий підвіс. Однією з найважливіших характеристик безконтактного підвісу є момент тертя та потужність витрат на тертя. Витрати на тертя у газових підшипниках виникають за рахунок в’язкого тертя усередині шару газоподібного мастильного матеріалу. Момент тертя концентричного радіального газового підшипника визначається виразом [1]
![]() , (1.1)
, (1.1)
де ![]() - динамічна в’язкість
газоподібного мастильного матеріалу,
- динамічна в’язкість
газоподібного мастильного матеріалу,
R - радіус підшипника,
L - довжина підшипника,
С - середній радіальний зазор,
![]() - кутова швидкість.
- кутова швидкість.
Момент тертя у симетрично навантажених газових підшипниках з гладкими поверхнями [1]
![]() , (1.2)
, (1.2)
де r0 та ri - зовнішній та внутрішній радіуси підшипника,
h - зазор між поверхнями.
З виразів (1.1)
та (1.2) видно, що внаслідок малої в’язкості ![]() газу
у мастильному шарі, момент тертя та втрати на тертя дуже малі. Газові
підшипники, жорсткість яких набагато вище жорсткості підшипників кочення [2],
уступають їм у відношенні несучої здатності. Швидкохідність газових підшипників
визначається швидкістю шейки валу, максимальне значення якої складає 300-350
м/с. Основною причиною, що обмежує швидкохідність ротору на газових
підшипниках, є його динамічна нестійкість, що виникає при появі
напівшвидкісного вихору або синхронного вихору, що обумовлено дисбалансом
ротора. До недоліків газових підшипників, що обмежують їх використання, слід
віднести явище нестійкості типу «пневматичний молот», що обумовлено
стискуємістю газового шару [3].
газу
у мастильному шарі, момент тертя та втрати на тертя дуже малі. Газові
підшипники, жорсткість яких набагато вище жорсткості підшипників кочення [2],
уступають їм у відношенні несучої здатності. Швидкохідність газових підшипників
визначається швидкістю шейки валу, максимальне значення якої складає 300-350
м/с. Основною причиною, що обмежує швидкохідність ротору на газових
підшипниках, є його динамічна нестійкість, що виникає при появі
напівшвидкісного вихору або синхронного вихору, що обумовлено дисбалансом
ротора. До недоліків газових підшипників, що обмежують їх використання, слід
віднести явище нестійкості типу «пневматичний молот», що обумовлено
стискуємістю газового шару [3].
Одним з методів реалізації безконтактного підвісу роторних систем є магнітний підвіс, втрати на тертя в якому обумовлені взаємодією вихрових струмів, що виникають в цапфі ротору при його обертанні, з магнітним полем елементів, що забезпечують підвіс. Із визначення втрат на тертя у магнітному підвісі випливає, що струм статору ЕМ, що збільшується при збільшенні кутової швидкості обертання ротора, збільшує вихорові струми у цапфі ротора, що обумовлює збільшення втрат на тертя. Момент тертя магнітного підвісу визначається:
![]() , (1.3)
, (1.3)
де J - момент інерції ротора відносно його вісі обертання,
t - час.
Втрати потужності на тертя визначаються у вигляді
![]() . (1.4)
. (1.4)
Аналіз виразів (1.3) та (1.4) показує, що момент тертя збільшується прямо пропорційно кутовому прискоренню, а втрати потужності збільшуються із збільшенням кутової швидкості. Останнє є суттєвим недоліком магнітного підвісу, що значно обмежує його швидкохідність. Жорсткість магнітного підвісу менше жорсткості підшипників кочення та зменшується при збільшенні частоти обертання. При значному збільшенні частоти обертання у високошвидкісних роторних механізмах жорсткість магнітного підвісу прямує до нуля, що обумовлює втрату стійкості. Слід зазначити, що магнітний підвіс за своєю природою є нестійкою системою, стійкий підвіс одного магніту у полі другого неможливий. Стійкість магнітного підвісу забезпечується тільки при введенні системи автоматичного регулювання напруженості магнітного поля та щільності магнітного потоку збудження, що дозволяє компенсувати зміну положення тіла, що підвішується, та діючих на нього сил. Усі наведені вище недоліки магнітного підвісу обмежують його використання у високошвидкісних роторних системах. Тому такі системи з магнітним підвісом не знайшли широкого використання у промисловості.
Дослідження у напрямку компенсації недоліків газового та магнітного підвісів привели до створення систем магнітного розвантаження газового підвісу, тобто газові сили, які відштовхують ротор від статора, та магнітні сили, які притягують ротор до статора, взаємокомпенсуються та забезпечують стійкість системи. Слід зазначити, що таке поєднання не звільняє від динамічної нестійкості газового шару при появі напівшвидкісного та синхронного вихорів та не змінює характер залежності параметрів магнітного підвісу (моменту тертя, втрат на тертя, жорсткості) від частоти обертання, тобто не звільняє від недоліків газового та магнітного підвісів.
Приведений коефіцієнт тертя прецизійних опор кочення високошвидкісних роторних механізмів достатньо великий та може змінюватись в межах від 0,002 (для шарикопідшипників) до 0,01 (роликові підшипники) [1]. Аналогічний показник газових опор складає 0,0001 та визначається в основному тільки в’язким тертям усередині шару газової змазки [1]. Приведений коефіцієнт тертя магнітних опор обумовлений гальмівним ефектом магнітного поля, а момент тертя та втрати потужності на тертя збільшуються із збільшенням частоти обертання. Приведений коефіцієнт тертя газомагнітної опори може бути рівний аналогічному параметру газових опор та практично не залежить від частоти обертання.
Швидкохідність високошвидкісних роторних механізмів з прецизійними опорами кочення обмежена значними втратами на тертя та не перевищує 2,5 10 5 хв-1 при короткочасному ресурсі роботи та 4 10 4 хв-1 при довгостроковому. Швидкохідність роторних механізмів з газовими опорами може досягати значення 6,5 106 хв-1 [2]. Перевищення вказаної швидкості приводить до появлення динамічної нестійкості опори, що проявляється у вигляді напівшвидкісного або синхронного вихорів. Швидкохідність магнітного підвісу, що перевищує швидкохідність газового підвісу, обмежена різко зростаючими при збільшенні частоти обертання втратами на тертя. Швидкохідність газомагнітної опори практично обмежена механічною міцністю обертаючихся вузлів роторного механізму та може значно перевищувати швидкохідність газових чи магнітних опор.
Жорсткість опор кочення значно поступається аналогічному параметру газових опор, що обумовлюється більшою різницею площин, що передають навантаження від валу до корпусу опори, а також великою кількістю зазорів в опорах кочення. Жорсткість магнітних опор, поступається аналогічному параметру опор кочення, зменшується при збільшенні частоти обертання та прямує до нуля. Жорсткість газомагнітної опори значно перевищує жорсткість газової опори. Це обумовлено тим, що площа газомагнітної опори, що передає навантаження, дорівнює площі поверхні ротору та значно перевищує площу робочої поверхні газової опори. Окрім того, жорсткість газомагнітної опори є сумою жорсткості газового шару та магнітного поля, що створює магнітні сили навантаження газового шару.
Стійкість є одним з найбільш слабких місць газових опор, що зв’язано з явищами напівшвидкісного та синхронного вихорів, а також з явищем «пневмомолотка» [3], які приводять до порушення шару газової змазки, і як наслідок, до появлення безпосереднього торкання робочих поверхнею та виходу газового підшипника із строю. Стійкість магнітних опор, яка знижується при підвищенні частоти обертання, забезпечується зовнішньою системою автоматичного керування та давачами величини зазору. Газомагнітний підвіс є стійкою системою, якій придатні властивості саморегулювання та адаптивності до зміні зовнішнього навантаження, чого не мають інші опори.
Демпфування коливань ротору в газомагнітному підвісі значно перевищує аналогічний параметр роторних механізмів з газовими чи магнітними опорами. Особливістю газомагнітного підвісу є адаптивність його демпфучих властивостей до зміни зовнішнього навантаження.
Віброакустична активність, яка є важливим параметром роторного механізму, збільшується при збільшенні частоти обертання. Якщо віброакустична активність високошвидкісних роторних механізмів з прецизійними опорами кочення досить велика (що пояснюється механічними контактами в опорах та неспіввісністю зазорів опор та приводу), то відсутність механічних контактів у газових та магнітних опорах зменшує віброакустичну активність роторних механізмів з такими опорами на 10 – 15 дБА. Відсутність механічних контактів та неспіввісності робочих зазорів в роторних механізмах з газомагнітними опорами зменшує їх віброакустичну активність на 10-15 дБА у порівнянні з опорами кочення та на 5-10 дБА у порівнянні з газовими та магнітними опорами.
Несуча здатність опор кочення значно перевищує несучу здатність газових опор [3]. Підвищення несучій здатності газових опор зв’язано з підвищенням площі робочої поверхні газового підшипника або із збільшенням тиску наддуву, а значить, із збільшення масо-габаритних параметрів або енергоємності роторного механізму. Підвищення несучої здатності магнітних опор зв’язано з підвищенням щільності магнітного потоку збудження, а значить, з підвищенням втрат на тертя та зменшення жорсткості та стійкості при підвищенні частоти обертання. У газомагнітній опорі, що об’єднує в одному зазорі функції зазору газомагнітного підшипника та зазору електричної машини, площа робочої поверхні опори дорівнює площі робочої поверхні ротору та значно перевищує площу робочої поверхні газової опори. Відповідно, несуча здібність газомагнітної опори значно перевищує несучу здібність газової опори, наближаючись за своєю величиною до несучої здібності підшипників кочення.
Кількість робочих зазорів у роторних механізмах з прецизійними опорами кочення складає як правило від 3 до 6 зазорів. Неспіввісність, яка з’являється внаслідок великої кількості зазорів, значно збільшує віброакустичну активність роторного механізму. Заміна опор кочення газовими або магнітними опорами не змінює конструктивної схеми роторного механізму та збільшує кількість робочих зазорів у зв’язку з необхідністю одночасного використання радіальних та осевих опор, що приводить до ускладнення конструкції.
Газомагнітний підвіс ротору здійснюється безпосередньо в робочому зазорі електричної машини, що дозволяє обмежити кількість робочих зазорів роторного механізму одним зазором, що об’єднує функції зазору безконтактної газомагнітної опори та зазору електричної машини. Така конструктивна схема не потребує співвісності зазорів опорних вузлів електричної машини, спрощує конструкцію роторного механізму та забезпечує його високу технологічність.
Надійність роторних механізмів з газомагнітними опорами майже на порядок перевищує надійність механізмів з газовими та магнітними опорами та майже на два порядки надійність опор на підшипниках кочення.
Порівняльний аналіз різних типів опор, який наведено вище, показує, що роторні системи з газомагнітними опорами, незначно поступаються механізмам з опорами кочення по несучій здібності, а по усім іншим параметрам перевершують високошвидкісні роторні системи з прецизійними опорами кочення, газовими та магнітними опорами. Це обумовлює добрі перспективи подальшого розвитку газомагнітних опор.
Підприємствами Ізраїлю, США, Німеччини, деякими підприємствами хімічної та електротехнічної промисловості України випускалися та випускаються синхронні гістерезисні ЕМ з газомагнітним підвісом, які мають дисковий та конічний ротор. Вони часто використовуються у текстильній промисловості (веретена, прядильні машини), хімічній промисловості (розпилювачі), медицині (апарати для створення штучної атмосфери соляних печер) західних держав та держав СНД. Найбільш розповсюдженими з них є ЕМ з конічним ротором. Це обумовлено високою стійкістю конічного ротору як в осевому так і в радіальному напрямку.
В теперішній час для контролю параметрів ЕМ з газомагнітним підвісом ротору використовуються традиційні пристрої, що не завжди забезпечує високу вірогідність контролю. Математичні моделі цих ЕМ не досліджені з точки зору визначення аналітичних виразів для контролю їх основних параметрів, не існують пристрої контролю, що враховують їх специфіку. Тому в якості об’єкту контролю доцільно обрати синхронну гістерезисну ЕМ з газомагнітним підвісом конічного ротору, як одну з найбільш розповсюджених високо оборотних ЕМ.
Високоточний контроль та вимірювання кутової швидкості має велике значення не тільки при випробуваннях ЕМ, а в багатьох випадках і під час їх роботи. Це стосується систем точних приводів, систем автоматики, у яких ЕМ є складовими компонентами, систем, у яких відбувається керування електроприводами. Складним завданням є високоточний контроль та вимірювання кутової швидкості у динамічному режимі, контроль та вимірювання залежності кутової швидкості від часу - швидкісних діаграм. Контроль кутової швидкості у динамічному режимі ускладнюється рядом причин :
- контроль кутової швидкості у динамічному режимі проводиться за короткий проміжок часу;
- інформативні параметри змінюються у широкому діапазоні;
- виникає необхідність сумісних вимірювань часу та кутової швидкості;
- необхідність вияву короткочасних змін - «голкових провалів моменту», які
суттєво погіршують якість механічної енергії, сприяють виникненню ударів в
механічній трансмісії, що має зазори, з якою з’єднана ЕМ;
- відсутність методик розрахунку динамічних метрологічних характеристик;
Рівняння обертання валу ЕМ описується наступним рівнянням [4]:
![]() , (1.5)
, (1.5)
де М0 - момент опору на валу,
М![]() - обертаючий
(електромагнітний) момент.
- обертаючий
(електромагнітний) момент.
Динамічний момент ЕМ визначається лівою частиною рівняння (1.5) та дорівнює різниці між обертаючим моментом та моментом на валу, визначає кутове прискорення ротору та зв’язаних з ним мас.
![]() . (1.6)
. (1.6)
Момент опору обумовлений наявністю зовнішніх мас, що зв’язані з валом ЕМ. Він може існувати у перехідних та усталеному режимах роботи та бути відсутнім при випробуваннях ЕМ, може змінюватись у часі та залежати від кутової швидкості, але він характеризує зовнішні маси, а не саму ЕМ. При відсутності моменту опору на валу динамічний момент дорівнює обертаючому.
Аналіз виразу (1.5) свідчить про необхідність проведення вимірювання та контролю кутової швидкості в динамічному режимі та контролю моменту інерції для контролю та визначення параметрів руху.
Момент інерції
ротору є однією з найважливіших характеристик ЕМ, яка визначає її динамічні
властивості. Однак у довідковій літературі та технічних умовах на ЕМ він
вказується не завжди. У відповідності з [5] момент інерції ротору може мати
великі відхилення від номінального значення (![]() 10
% ). При проектуванні різноманітних електроприводів та систем автоматики
розробників цікавлять точні значення моменту інерції роторів ЕМ (а деколи і
роторів у зборі з виконавчими пристроями), оскільки вони визначають тепловий
режим та швидкохідність ЕМ. Внаслідок неоднорідності матеріалу та складних
геометричних форм ротору розрахункове визначення моменту інерції є трудомістким
завданням зі складною методикою та великою похибкою. Більш точним є
експериментальне визначення моменту інерції. Питанням експериментального
визначення моменту інерції присвячено багато наукових робіт [6, 7], але
високоточного, простого, швидкодіючого пристрою його контролю досі нема.
Найбільш розповсюджені в теперішній час методи визначення моменту інерції [6],
це метод допоміжного маятнику, який використовується для ЕМ потужністю від 10
до 1000 кВт, метод самогальмування, який використовується для ЕМ потужністю
вище 100 кВт, метод крутильних коливань. Останній є найбільш універсальним та
придатний для контролю моменту інерції ЕМ як великої потужності, так і
мікродвигунів. Згідно цієї методики, частина ЕМ, що обертається, підвішується у
вертикальному положенні осі обертання та приводиться у крутильний коливальний
рух. При цьому визначається період малих крутильних коливань, який потім
порівнюється з періодом коливань еталонного тіла з відомим моментом інерції.
Шуканий момент інерції визначається з виразу:
10
% ). При проектуванні різноманітних електроприводів та систем автоматики
розробників цікавлять точні значення моменту інерції роторів ЕМ (а деколи і
роторів у зборі з виконавчими пристроями), оскільки вони визначають тепловий
режим та швидкохідність ЕМ. Внаслідок неоднорідності матеріалу та складних
геометричних форм ротору розрахункове визначення моменту інерції є трудомістким
завданням зі складною методикою та великою похибкою. Більш точним є
експериментальне визначення моменту інерції. Питанням експериментального
визначення моменту інерції присвячено багато наукових робіт [6, 7], але
високоточного, простого, швидкодіючого пристрою його контролю досі нема.
Найбільш розповсюджені в теперішній час методи визначення моменту інерції [6],
це метод допоміжного маятнику, який використовується для ЕМ потужністю від 10
до 1000 кВт, метод самогальмування, який використовується для ЕМ потужністю
вище 100 кВт, метод крутильних коливань. Останній є найбільш універсальним та
придатний для контролю моменту інерції ЕМ як великої потужності, так і
мікродвигунів. Згідно цієї методики, частина ЕМ, що обертається, підвішується у
вертикальному положенні осі обертання та приводиться у крутильний коливальний
рух. При цьому визначається період малих крутильних коливань, який потім
порівнюється з періодом коливань еталонного тіла з відомим моментом інерції.
Шуканий момент інерції визначається з виразу:
![]() , (1.7)
, (1.7)
де ![]() - момент інерції
еталонного тіла,
- момент інерції
еталонного тіла,
![]() - період коливань еталонного
тіла,
- період коливань еталонного
тіла,
![]() - період коливань частини ЕМ,
що обертається.
- період коливань частини ЕМ,
що обертається.
Незважаючи на універсальність, цей метод має такі суттєві недоліки, як необхідність розбирання ЕМ та велику трудомісткість, що значно обмежує його використання. За допомогою цього методу неможливий контроль моменту інерції ЕМ в процесі їх роботи та без їх демонтування.
Нині відомі наукові розробки, що присвячені визначенню параметрів та характеристик ЕМ з аналізу динамічних режимів їх роботи [6, 7]. У роботах [8, 9], розроблено спосіб визначення моменту інерції та моменту опору на валу за допомогою двох зразкових мас з відомими моментами інерції на основі використання інформації про зміну кутової швидкості. Він полягає у вимірюванні кутового прискорення у режимах пуску та самогальмування асинхронної трифазної ЕМ при встановлених на валу зразкових масах. На основі отриманих результатів вирішується система рівнянь, з якої знаходяться шукані величини. Цей метод має високу точність, та у порівнянні з іншими методами, високу швидкодію, але він не придатний для контролю моменту інерції ЕМ з газомагнітним підвісом ротору, тому як для більшості таких машин режим самогальмування відсутній, а зупинення здійснюється примусово, шляхом подання постійної напруги замість змінної напруги живлення, що створює гальмівний момент.
Для контролю моменту інерції таких ЕМ перспективним є спосіб, заснований на визначенні амплітуди крутильних коливань ротору під час їх роботи в усталеному режимі. Але він потребує подальшої розробки для визначення аналітичних співвідношень, що зв’язують контролюємий параметр з вихідними параметрами ЕМ, інформацію про які можна отримати шляхом прямих вимірювань.
Механічна характеристика (МХ) є однією з найважливіших та найбільш інформативних характеристик ЕМ та визначається як залежність між обертаючим моментом та кутовою швидкістю обертання:
М=f(![]() ), (1.8)
), (1.8)
або
![]() =f(М), (1.9)
=f(М), (1.9)
що отримана при незмінних напрузі живлення та частоті мережі.
Вигляд МХ обумовлюється різноманітними початковими умовами та іншими параметрами. З великою кількості таких МХ виділяють пускову МХ, яка називається ще природною та вимірюється при підключені ЕМ до мережі живлення з номінальними параметрами при відсутності на валу моменту опору та додаткових моментів інерції. За МХ при відповідних умовах розраховуються статичні параметри ЕМ. Наприклад, для трифазної асинхронної ЕМ, МХ режиму реверсу при наявності належного додаткового моменту інерції, наближується до МХ статичного режиму, що дає можливість зменшити час вимірювань таких статичних параметрів, як початковий пусковий момент, максимальний момент та інші. Окрім цього за МХ характеристикою можливо оцінити деякі види браку. Наприклад, при асиметрії обмотки ротору асинхронного двигуна, форма МХ характеристики суттєво відрізняється від зразкової. При невірному з’єднанні секцій обмотки статору час розбігу затягнений у порівнянні із зразковим.
З вищесказаного слідує, що підвищення точності визначення не тільки механічної характеристики, а і багатьох інших параметрів ЕМ вимагає наявності високоточних пристроїв вимірювання та контролю кутової швидкості у статичному та динамічному режимах роботи об’єкту контролю, та точних автоматичних і швидкодіючих пристроїв контролю моменту інерції роторної системи для будь-якої ЕМ. Це обумовлює доцільність їх подальшої розробки та дослідження.
2. Техніко-економічне обґрунтування доцільності розробки комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
2.1 Особливості вимірювання параметрів електричних машин з газомагнітним підвісом
Задачі контролю та управління якістю, які вирішуються на різних етапах процесів виготовлення та використання електромеханічних перетворювачів енергії (ЕМПЕ), є різноманітні та взаємопов’язані. В теперішній час, завдяки досягненням мікропроцесорної та вимірювальної техніки стало можливим використовувати автоматичні пристрої та системи різного рівня інтелекту для вимірювання та контролю різноманітних параметрів ЕМПЕ як в процесі їх виготовлення, так і під час їх експлуатації. В інформаційному забезпеченні систем контролю і управління якістю значна роль відводиться проведенню контрольно-вимірювальних, випробних та діагностичних робіт. Ці роботи спрямовані на отримання та використання інформації про показники надійності та якості виробляємих електричних машин. Відповідальними етапами на шляху створення інтегрованих систем вимірювання, контролю, управління якістю вироблюємих електричних машин є розробка та впровадження сучасних методів для промислового контролю, випробувань та діагностики.
При різних видах
випробувань ЕМПЕ виникає необхідність вимірювання характеристик руху (ХР), а
саме кутової швидкості обертання ![]() ;
сковзання
;
сковзання ![]() ; обертаючого моменту М;
механічної характеристики; приведеного моменту інерції ротору ЕМПЕ J; моменту
механічних втрат М0. Перераховані фізичні величини входять до
загального рівняння рух електричної машини (ЕМ), що дає можливість об’єднати їх
під загальною назвою характеристики руху електричних машин ХР ЕМ; Вони повинні
визначатись як у статичному так і динамічному режимах роботи.
; обертаючого моменту М;
механічної характеристики; приведеного моменту інерції ротору ЕМПЕ J; моменту
механічних втрат М0. Перераховані фізичні величини входять до
загального рівняння рух електричної машини (ЕМ), що дає можливість об’єднати їх
під загальною назвою характеристики руху електричних машин ХР ЕМ; Вони повинні
визначатись як у статичному так і динамічному режимах роботи.
Механічна характеристика (МХ) є однією з найважливіших та
найінформативніших
характеристик ЕМПЕ та визначається як залежність між обертаючим моментом та
кутовою швидкістю обертання М=f(![]() ) або
) або ![]() =f(М), що отримана при
незмінних напрузі живлення та частоті мережі [13].
=f(М), що отримана при
незмінних напрузі живлення та частоті мережі [13].
Вигляд МХ обумовлюється різноманітними початковими умовами та іншими параметрами. З великою кількості таких МХ виділяють пускову МХ, яка називається ще природною та вимірюється при підключенні ЕМ до мережі живлення з номінальними параметрами при відсутності на валу моменту опору та додаткових моментів інерції. За МХ при відповідних умовах розраховуються статичні параметри ЕМПЕ. Наприклад, для трифазного асинхронного електродвигуна, МХ режиму реверсу при наявності належного додаткового моменту інерції, наближується до МХ статичного режиму, що дає можливість зменшити час вимірювань таких статичних параметрів, як початковий пусковий момент, максимальний момент та інші. Окрім цього за МХ характеристикою можливо оцінити деякі види браку. Наприклад, при несиметрії обмотки ротора асинхронного двигуна, форма МХ характеристики суттєво відрізняється від зразкової. При невірному з’єднанні секцій обмотки статора час розбігу затягнений у порівнянні із зразковим [14].
Вимірювання МХ у перехідному режимі роботи ЕМПЕ має наступні особливості у порівнянні з вимірюванням в статичному режимі: динамічні вимірювання проводяться за короткий проміжок часу; інформативні параметри змінюються у широкому діапазоні; в деяких випадках виникає необхідність сумісних вимірювань (наприклад кутова швидкість вимірюється сумісно з часом, що потребує наявності двох вимірювальних каналів); необхідність вияву короткочасних змін - «голкових провалів моменту», які суттєво погіршують якість механічної енергії, сприяють виникненню ударів в механічній трансмісії, що має зазори, з якою з’єднано електродвигун; відсутність методик розрахунку динамічних метрологічних характеристик.
Рух обертання ЕМПЕ описується наступним рівнянням [15]:
![]() (2.1)
(2.1)
Аналіз виразу (2.1) свідчить про необхідність проведення динамічних вимірювань кутової швидкості для визначення параметрів руху. Кутова швидкість, а точніше її залежність від часу є як і МХ однією з найважливіших характеристик ЕМПЕ. Контроль кутової швидкості в багатьох випадках є необхідним у різноманітних технологічних процесах. Вимірювання МХ нерозривно зв’язане з вимірюванням кутової швидкості обертання, а вимірювання кутової швидкості у динамічному режимі ускладнено тими самими причинами, що і вимірювання механічної характеристики. Питанням автоматизації та механізації праці при випробуваннях ЕМПЕ приділяється недостатньо уваги. Вітчизняною промисловістю не виготовляються автоматизовані прилади для досліджень та промислових випробувань. Між тим, електродвигуни в основному є садовими інших, більш складних виробів. Тому відказ в роботі електродвигуна може привести до відказу в роботі всього пристрою, вартість якого значно перевищує вартість електродвигуна. Вище сказане обумовлює необхідність подальшої розробки автоматизованих пристроїв не тільки для промислового контролю характеристик електродвигунів, а також під час їх експлуатації. Розвиток інформаційно-вимірювальної техніки у напрямку все більшого використання мікроконтролерів, персональних ЕОМ, ускладнення об’єктів вимірювання, і як наслідок алгоритмів процедур вимірювання, вимагає використання інтелектуальної апаратури.
2.2 Проведення маркетингових досліджень
При створенні розробки велика увага повинна приділятися ринковим умовам, тому, що перевагу одержують найбільш прості i доступні для впровадження розроблені системи вимірювання та контролю кутової швидкості, якi мають малу ціну i велику надійність. Найбільш близька модель ринку, яка досліджується в дипломному проектi - олiгополiя. Висновок обумовлений тим, що цим питанням займається обмежена кількість фірм. До них відносяться науково-дослідні інститути i дослідні лабораторії. Велика перевага даної розробки у її гнучкості i застосуванні до різних систем обладнання різноманітних підприємств. Дана розробка забезпечує вимірювання та контроль частоти обертання у великих межах. Крім того дана система легко переобладнується для використання в інших цілях. Даний пристрій вимірювання та контролю частоти обертання буде притягувати до себе увагу багатьох підприємств i фірм, оскільки розроблювана система забезпечує ефективну роботу. Потенційними споживачами розробляємого пристрою можуть бути цукрові заводи, але споживачами також будуть великі підприємства, якi мають справу з системами, де потрібно вимірювати та контролювати кутову швидкість. Так як прилад має великі межі вимірювання, то він набуде більшого застосування, ніж подібні йому прилади. Пристрої розроблені на основі мікропроцесорної техніки будуть мати велику надійність. Отже, їх робота забезпечить надійну роботу систем, де необхідно контролювати частоту обертання на протязі декількох років, з урахуванням того, що сезон цукроваріння складає 70 - 90 діб. Із вище сказаного можна зробити висновок про те, що цукрові заводи Вінницької області, будуть споживачами даної системи, отже, тільки в перший рік потрібно буде виготовити біля 80 (шт), на наступні роки біля 25 (шт). З урахуванням того, що даний пристрій з успіхом може використовуватись і на інших підприємствах, таких як науково-дослідні лабораторії, підприємства по виготовленню електротехнічної продукції, то можливо виробництво даної розробки зросте.
2.3 Розробка вимог до розробляємої системи
Виходячи з вище сказаного, можливо сформулювати основні вимоги до розробляємого пристрою для контролю та високоточного вимірювання кутової швидкості обертання валу електродвигунів малої потужності та мікродвигунів: пристрій повинен бути реалізовано на основі ПЕОМ, що дозволить проводити обробку результатів вимірювання, подавати результати вимірювання і контролю у графічному вигляді, розраховувати інші характеристики електродвигуна; відомі в теперішній час ТП не можуть повністю задовольнити сучасним вимогам, тому доцільно розробити ТП вільний від вказаних вище недоліків; пристрій повинен забезпечувати надійну роботу на протязі 2 - 3 років; вся елементна база повинна вибиратись надійною і з порівняно невеликою ціною ,що дасть малу ціну виробу; пристрій повинен бути надійним і витримувати певні навантаження, зміну кліматичних умов в великих межах; собівартість виробу повинна бути мінімальною, що досягається малою ціною комплектуючих, але які забезпечують потрібну надійність; забезпечення стійкої роботи в екстремальних умовах (пікові викиди струму в мережі живлення, електромагнітні перешкоди, висока температура оточуючого середовища, тощо). Вимоги до розробляємого ТП наступні: малий вносимий момент опору на вал об’єкту досліджень; малі габарити; висока швидкодія; аналоговий вихідний сигнал, перша похідна якого прямопропорційна миттєвому значенню кутової швидкості; чутливість до напрямку обертання; простота конструкції;
Із наведеного вище видно, що досягаючи поставлених вимог до даної розробки можна досягти великих успіхів у розробці з технічної сторони економічного, високонадійного , який буде мати незначну похибку та велику швидкодію, з економічної сторони: конкурентноздатним, який буде мати порівняно малу ціну.
2.4 Порівняльна характеристика розробляємої системи
Проведемо порівняльний аналіз розробляємого пристрою для контролю та високоточного вимірювання у динамічному режимі кутової швидкості обертання валу електродвигунів.
Найбільш простим і зручним для проведення аналізу і вибору базового методу для розробки пристрою є узагальнений якісний критерій якості (УКЯ). Якісний критерій характеризує, досягнута чи не досягнута ціль, яку поставлено перед пристроєм. Цей критерій якості можна трактувати як приймаючий тільки два значення: 1- якщо ціль досягнута, 0- в протилежному випадку. Тоді УКЯ буде являти собою суму окремих якісних критеріїв якості (ОКЕ), які характеризують окремі цілі, поставлені перед пристроєм.
![]() , (2.6)
, (2.6)
де αі - вагові коефіцієнти; bі - загальна кількість ОКЯ.
Відносні значення bі розраховуються за нижченаведеними формулами:
а) Для показників, зростання яких говорить про підвищення в лінійній залежності якості розробки:
![]() , (2.7)
, (2.7)
б) Для показників, зростання яких говорить про зниження в лінійній залежності якості розробки:
![]() , (2.8)
, (2.8)
При цьому обумовимо, що для досягнення якої-небудь окремої цілі пристрій повинен реалізовувати усі свої потенційні можливості в рамках використовуємого способу вимірювання. Це положення дозволяє проводити порівняльний аналіз пристроїв на рівні реалізованих у ньому способів вимірювання.
Вважаючи, що пристрій повинен забезпечувати як функціональні, так і економічні вимоги на одному рівні, необхідно дотримуватися наступних умов:
![]() . (2.9)
. (2.9)
Результати порівняльного аналізу наведено у таблиці 2.1.
Таблиця 2.1 - Порівняльний аналіз розробляємого пристрою та його аналогів
| Назва критерію | Пристрій на основі частотного ТП | Пристрій на основі тахогенератору | Пристрій на основі ФТП з аналого-вим вихідним сигналом | Розроблю-ємий пристрій | Потенційний пристрій | |
| Широкий діапазон контролюємих кутових швидкостей | 1 | 0 | 0 | 1 | 1 | |
| Чутливість до напрямку обертання | 0 | 1 | 1 | 1 | 1 | |
| Малий вносимий момент опору на валу об’єкту досліджень | 1 | 0 | 1 | 1 | 1 | |
| Можливість проведення динамічних вимірювань | 1 | 1 | 1 | 1 | 1 | |
| Низька собівартість | 1 | 0 | 1 | 1 | 1 | |
| Простота конструкції | 1 | 0 | 1 | 1 | 1 | |
| Висока швидкодія | 1 | 0 | 0 | 1 | 1 | |
| Простота алгоритму обробки вихідного сигналу | 1 | 1 | 0 | 1 | 1 | |
| Простота пристрою для вторинної обробки сигналу | 1 | 0 | 0 | 0 | 1 | |
| Необхідність сумісного вимірювання часу при динамічних вимірюваннях | 0 | 0 | 1 | 1 | 1 | |
|
|
8 | 3 | 6 | 9 |
|
|
|
|
0.8 | 0.3 | 0.6 | 0.9 | 1 | |
Як слідує з аналізу табл. 2.1, розробляємий пристрій для контролю та високоточного вимірювання у динамічному режимі кутової швидкості обертання валу електродвигунів має найбільший у порівнянні з аналогами показник ефективності, що свідчить про доцільність його розробки.
2.5 Економічна доцільність нової технічної розробки
2.5.1 Прогнозування собівартості
Спрогнозуємо собівартість нової технічної розробки методом питомої ваги.
Цей метод доцільно застосовувати тоді, коли є можливість розрахувати одну з прямих витрат і встановити питому вагу даної статті, в собівартості аналогова. Собівартість одиниці нової продукції можна спрогнозувати за формулою:
![]() (грн). (2.10)
(грн). (2.10)
де КН – коефіцієнт, який враховує конструктивні та технологічні особливості нової розробки, КН = 1÷1,2
ВП – величина однієї із статей витрат, яка вибрана за основу, грн.;
П – питома вага однієї із прямих витрат в собівартості аналогова, %;
Вартість одиниці продукції аналога становить приблизно 1000 грн. Відомо, що питома вага для аналога становитиме 60 %, а питома вага нової розробки становить 65 %.При цьому собівартість розробки складатиме:
![]() (грн)
(грн)
Собівартість же нової розробки становитиме:
![]() (грн)
(грн)
2.5.2 Прогнозування величини капітальних вкладень
Розрахуємо величину капітальних вкладень для більшості сучасних аналогів та для нової розробки за формулою:
К = В * А * S (грн)= В*Ц (грн). (2.11)
де S – собівартість нової розробки, яка оцінюється приблизним способом;
В – коефіцієнт,
який враховує витрати на розробку, придбання, транспортування, монтаж,
налагодження тощо нової розробки, В ![]() 1,1
÷ 1,8;
1,1
÷ 1,8;
А – коефіцієнт,
який враховує прогнозований прибуток, податки, які повинен виплатити виробник
тощо, А ![]() 1,5 ÷ 2;
1,5 ÷ 2;
Ц – ціна реалізації нової розробки, якщо вона визначена раніше, грн..
К1 = 1,6 · 2 · 2000 = 6400 (грн.)
К2 = 1,4 · 2 · 2036,73 = 5702,84 (грн)
2.5.3 Прогнозування величини експлуатаційних витрат
Розрахуємо експлуатаційні витрати для аналога та нової розробки за формулою:
Е = k × Ц × b = k × A × S × b (грн/рік), (2.12)
де Ц - ціна реалізації нової розробки, якщо вона визначена раніше, грн./шт., k-коефіцієнт, який ураховує витрати на амортизацію, електроенергію, обслуговування, ремонт тощо. Рекомендується приймати значення k = (0,2¸0,4). Для обчислювальної техніки значення k рекомендується приймати по максимуму. А - коефіцієнт, який враховує прогнозований прибуток, податки, які повинен виплачувати виробник тощо; А » 1,5 ¸ 2, S - собівартість нової розробки, грн., яка оцінювалася вище;
b - доля часу, який витрачає працівник на обслуговування вибору в загальному часі своєї роботи.
Е1 = 0,4 × 2 × 2000 × 0,6 = 960 (грн/рік)
Е2 = 0,4 × 2 × 2036,73 × 0,6 = 977,63 (грн/рік)
Якщо К1 = 6400 грн., К2 = 5702,84 грн. то співвідношення між аналогом та новою розробкою по капітальних вкладеннях – К1 > К2. Якщо Е1 = 960 грн/рік, Е2 = 977,63 грн/рік, то співвідношення між аналогом та новою розробкою по експлуатаційних витратах – Е1 < Е2. Як можна побачити, при впровадженні нової технічної розробки підприємство буде мати економію коштів по капітальних вкладеннях та експлуатаційних витратах у розмірі:
Кеф = 6400 – 5702,84 = 697,16 (грн).
Ееф = 960-977,63 = - 17,63 (грн/рік).
Такий варіант свідчить про абсолютну економію як на питомих капіталовкладеннях, так і на експлуатаційних витратах, тобто кращою буде нова розробка, що свідчить про доцільність проектування та впровадження її в виробництво.
3 Розробка структурної схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
До складу розробляємого пристрою входить первинний тахометричний перетворювач. Як було вказано у попередньому розділі, цей ТП буде мати аналоговий вихідний сигнал, прямопропорційний куту повороту. Шляхом обчислення його першої похідної визначається кутова швидкість.
Аналогові диференціюючі пристрої мають велику похибку та вузький частотний діапазон, що не може задовольнити вимоги технічного завдання. Тому необхідно використати цифрове диференціювання вихідного сигналу ТП. Існують три види цифрового диференціювання [16]:
перший тип - це дискретний диференціатор з усередненням. Принцип його дії полягає у відніманні через однакові інтервали часу миттєвих значень вхідного сигналу. Сигнал на виході диференціатора першого типу описується виразом:
![]() (3.1)
(3.1)
де ![]() - інтервал дискретності;
- інтервал дискретності;
другий тип - це дискретний диференціатор з осередненням. У цьому диференціаторі віднімаються через однакові інтервали часу попередньо проінтегровані на цих інтервалах значення вхідного сигналу. Сигнал на виході диференціатора другого типу:
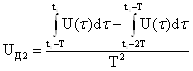 , (3.2)
, (3.2)
цифровий диференціатор третього типу - це диференціатор з усередненням на частині інтервалу. У ньому віднімаються через однакові інтервали часу попередньо проінтегровані на частині цих інтервалів значення вхідного сигналу. Вихідний сигнал описується виразом
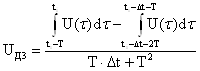 , (3.3)
, (3.3)
Імпульсні характеристики диференціаторів першого, другого та третього типів описуються відповідно виразами
![]() , (3.4)
, (3.4)
![]() , (3.5)
, (3.5)
![]() , (3.6)
, (3.6)
де ![]() - дельта-функція Дирака,
- дельта-функція Дирака,
![]()
Провівши пряме перетворення Фур’є від імпульсних характеристик та відокремивши дійсну та мниму частини отримуємо частотні та фазові характеристики диференціаторів. Для диференціатора першого типу:
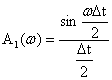 , (3.7)
, (3.7)
![]() . (3.8)
. (3.8)
Для диференціаторів другого типу:
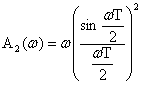 , (3.9)
, (3.9)
![]() . (3.10)
. (3.10)
Для диференціаторів третього типу
 , (3.11)
, (3.11)
![]() . (3.12)
. (3.12)
Вибір одного з цих трьох видів залежить від конкретного випадку, але кожен з них обумовлює необхідність використання аналого-цифрового перетворювача.
Розробляємий пристрій призначений для високоточного вимірювання та контролю кутової швидкості та інших параметрів руху ЕМПЕ у динамічному режимі. Тобто він повинен працювати як в режимі реального часу так і обчислювати залежності кутової швидкості, кутового прискорення, кута повороту валу від часу. Це обумовлює необхідність реалізації пристрою на основі персональної ЕОМ.
Таким чином, пристрій буде складатись з двох структурних блоків:
- тахометричного перетворювача;
- блоку спряження тахометричного перетворювача з ПЕОМ.
Для узгодження роботи аналого-цифрового перетворювача та мікропроцесора ПЕОМ необхідно використати порт уведення-виведення та схему його ініціалізації.
Для запуску аналого-цифрового перетворювача використовується генератор з кварцевою стабілізацією частоти. При відомому періоді частоти цього генератору можливе вимірювання залежностей параметрів руху від часу, не проводячи сумісних вимірювань часу.
Данні та керуючі сигнали порту уведення-виведення передаються на системну шину та ОЗУ ПЕОМ. Після проведення вимірювань здійснюється контроль середнього значення кутової швидкості.
Структурну схему розробляємого пристрою наведено на рис. 3.1 та у графічній частині дипломного проекту.
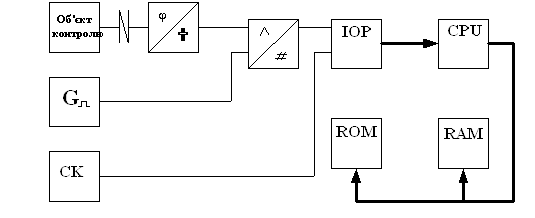
Рисунок 3.1 – Схема електрична структурна пристрою контролю середнього значення кутової швидкості
4. Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
4.1 Аналіз лінійного фотоприймача
Фотоелектричні перетворювачі площа-напруга (ППН) використовуються у багатьох пристроях, таких як перетворювачі інтенсивності світлового потоку, первинні тахометричні перетворювачі та інші. Розглянемо ППН на основі пари фотодіод-операційний підсилювач (Рисунок 4.1). У цій схемі фотодіод VD діє як генератор струму, а операційний підсилювач DA перетворює цей струм у напругу. Залежність струму, що протікає через фотодіод, від потоку опромінення, описується виразом:
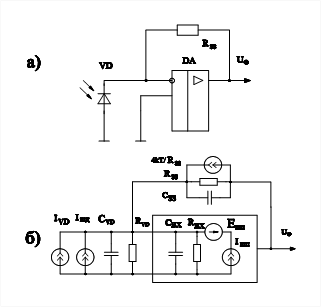
Рисунок 4.1 - Фотоприймач на основі пари фотодіод - операційний підсилювач (а) та його еквівалентна схема (б)
![]() (4.1)
(4.1)
де IVD - струм фото діоду;
SI0 - інтегральна струмова чутливість фотодіоду при немодульованому опроміненні;
![]() - потік опромінення;
- потік опромінення;
IS - темновий струм фото діоду;
U - падіння напруги на фотодіоді;
Т - абсолютна температура;
k - постійна Больцмана;
е - заряд електрона;
![]() - циклічна частота потоку
опромінення;
- циклічна частота потоку
опромінення;
![]() - постійна часу фотодіоду,
яка залежить від значень внутрішнього опору фотодіоду RVD, паразитної
ємності фотодіоду СVD, часом розсосування неосновних носіїв заряду.
- постійна часу фотодіоду,
яка залежить від значень внутрішнього опору фотодіоду RVD, паразитної
ємності фотодіоду СVD, часом розсосування неосновних носіїв заряду.
При використанні джерела світла з конденсорною лінзою, можна отримати плоско-паралельний потік опромінення, однаковий на всій площині, що освітлюється. У цьому випадку потік опромінення та площа фоточутливого шару фотодіоду, що опромінюється, зв’язані співвідношенням:
![]() , (4.2)
, (4.2)
де J![]() - інтенсивність променевого
потоку;
- інтенсивність променевого
потоку;
r - відстань від джерела світла до поверхні, що освітлюється;
S - площа, що опромінюється;
I - сила світла.
Вихідна напруга ППН, з урахуванням напруги зміщення нуля, різниці вхідних струмів, напруги шуму, описується виразом:
 (4.3)
(4.3)
де К - коефіцієнт передачі операційного підсилювача;
RВХ - вхідний опір операційного підсилювача;
![]() - напруга зміщення нулю операційного
підсилювача;
- напруга зміщення нулю операційного
підсилювача;
![]() - різниця вхідних струмів
операційного підсилювача;
- різниця вхідних струмів
операційного підсилювача;
![]() - напруга шуму на виході фотоприймача.
- напруга шуму на виході фотоприймача.
Модуль вихідної напруги шуму визначається виразом:
![]() , (4.4)
, (4.4)
де ![]() - спектральна щільність
напруги шуму операційного підсилювача;
- спектральна щільність
напруги шуму операційного підсилювача;
![]() - спектральна щільність
шумового струму операційного підсилювача;
- спектральна щільність
шумового струму операційного підсилювача;
![]() - спектральна щільність
шумового струму фотодіоду;
- спектральна щільність
шумового струму фотодіоду;
![]() - спектральна щільність
шумового струму опору зворотного зв’язку.
- спектральна щільність
шумового струму опору зворотного зв’язку.
Після перетворень, отримуємо вираз, що зв’язує спектральну щільність вихідної напруги фотоприймача з комплексною амплітудою площі фоточутливого шару фотодіоду, що освітлюється
 (4.5)
(4.5)
Вираз (4.5) можна
спростити. Різниця вхідних струмів ![]() для сучасних
операційних підсилювачів складає одиниці нА, а напруга зміщення
для сучасних
операційних підсилювачів складає одиниці нА, а напруга зміщення ![]() - одиниці мВ. При умовах
- одиниці мВ. При умовах ![]() та
та ![]() , значеннями
, значеннями ![]() та
та ![]() можна знехтувати. При
використанні елементної бази з низьким рівнем шумів, шумовою складовою виразу
(4.5) можна знехтувати. Внаслідок малого значення падіння напруги на фотодіоді
при його роботі у фотовольтаічному режимі та малого значення темнового струму, друга
складова чисельника виразу (4.5) близька до нуля.
можна знехтувати. При
використанні елементної бази з низьким рівнем шумів, шумовою складовою виразу
(4.5) можна знехтувати. Внаслідок малого значення падіння напруги на фотодіоді
при його роботі у фотовольтаічному режимі та малого значення темнового струму, друга
складова чисельника виразу (4.5) близька до нуля.
Вираз (4.5) описує математичну модель ППН, що дозволяє проводити його моделювання з урахуванням частотних та шумових властивості елементної бази, на основі якої побудовано перетворювач. Наведена модель є лінійною, тобто вона не враховує нелінійність фотодіоду. Це справедливо при умові, що фотодіод при роботі не наближується до стану насичення, де його нелінійні властивості особливо проявляються.
В більшості
випадків гранична частота фотодіоду значно менша за граничну частоту
операційного підсилювача. Тому спад частотної характеристики в області верхніх
частот визначається частотними властивостями фотодіоду. Це дає змогу знехтувати
впливом паразитної ємності в колі зворотного зв’язку та вхідною ємністю
операційного підсилювача. Вхідний опір сучасних операційних підсилювачів
складає десятки МОм, що значно перевищує опір в колі зворотного зв’язку та
внутрішній опір фотодіоду. Тому можна прийняти ![]() .
При умові, що частота опромінення значно менша за граничну частоту фотодіода,
його частотними властивостями можна знехтувати, вираз (4.5) прийме вигляд:
.
При умові, що частота опромінення значно менша за граничну частоту фотодіода,
його частотними властивостями можна знехтувати, вираз (4.5) прийме вигляд:
![]() (4.6)
(4.6)
Вираз (4.6) є максимально спрощеною математичною моделлю фотоприймача на основі пари фотодіод-операційний підсилювач як перетворювача площі в напругу, яку можна використовувати при умові того, що ширина спектру опромінення значно менша граничної частоти фотодіоду.
4.1.1 Розробка первинного вимірювального перетворювача
Первинний вимірювальний перетворювач крутильних коливань (ПВПКК) включає в себе вал 1 (рисунок 4.2), на який насаджено модулятор 2.
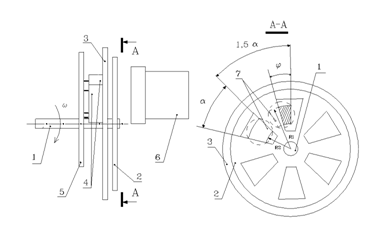
Рисунок 4.2 - Первинний вимірювальний перетворювач крутильних коливань
Модулятор має
вигляд диску, з чередуючимися прозорими та непрозорими елементами рівної
кутової ширини. За модулятором, зі сторони вала, розташована діафрагма 3, за
якою встановлено два фотодіода 4, які входять до складу фотоприймачів на основі
пари фото діод - операційний підсилювач. Елементи фотоприймачів та інші
електронні елементи ПВПКК розташовані на платі 5. Джерело світла 6 з
конденсорною лінзою освітлює фоточутливий шар фотодіодів через перехрестя
модулятора та діафрагми (його на рисунку 4.2. наведено штриховою лінією).
Діафрагма має вигляд пластини з двома отворами 7, зсунутими між собою на кут,
рівний 1,5![]() кутової ширини елементів
модулятора, відносно його центру, конфігурація яких визначається радіусами
модулятора та концентричними колами, радіусами R1 та R2,
центр яких співпадає з центром модулятора. Кутова ширина отворів діафрагми
дорівнює кутовій ширині прозорих елементів модулятора. При обертанні валу,
обертається і модулятор, внаслідок чого прозорі та непрозорі елементи модулятора
перекривають отвори діафрагми. При вище вказаній формі отворів діафрагми, площа
заштрихованого отвору, через яке світло при обертанні попадає на фоточутливий
шар фотодіоду фотоприймача (домовимось називати цей фотоприймач першим, а той,
що зсунутий відносно нього на 1,5
кутової ширини елементів
модулятора, відносно його центру, конфігурація яких визначається радіусами
модулятора та концентричними колами, радіусами R1 та R2,
центр яких співпадає з центром модулятора. Кутова ширина отворів діафрагми
дорівнює кутовій ширині прозорих елементів модулятора. При обертанні валу,
обертається і модулятор, внаслідок чого прозорі та непрозорі елементи модулятора
перекривають отвори діафрагми. При вище вказаній формі отворів діафрагми, площа
заштрихованого отвору, через яке світло при обертанні попадає на фоточутливий
шар фотодіоду фотоприймача (домовимось називати цей фотоприймач першим, а той,
що зсунутий відносно нього на 1,5![]() -
другим), лінійно залежить від кута повороту валу та визначається виразом
-
другим), лінійно залежить від кута повороту валу та визначається виразом
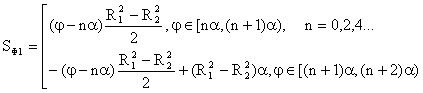 , (4.7)
, (4.7)
де ![]() - поточний кут повороту
заднього в напрямку обертання краю прозорого елементу модулятора, який умовно
прийнято за перший, відносно переднього в напрямку обертання краю першого
отвору діафрагми (рад),
- поточний кут повороту
заднього в напрямку обертання краю прозорого елементу модулятора, який умовно
прийнято за перший, відносно переднього в напрямку обертання краю першого
отвору діафрагми (рад),
R1, R2
- відповідно більший та менший радіус кола, що обмежує отвір діафрагми.
Вихідна напруга фотоприймача, як слідує з виразу (4.6), прямопропорційна площі
отвору, через який світло попадає на фоточутливий шар фотодіоду. Після
перетворень отримуємо вираз, який зв’язує вихідну напругу першого фотоприймача
з кутом повороту ![]() :
:
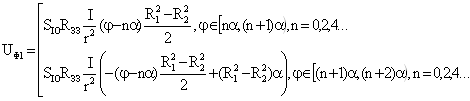 (4.8)
(4.8)
При використанні одного фотоприймача, виникають похибки, які обумовлені наступним причинами. По-перше, це похибка первинного перетворення, що виникає внаслідок частотних властивостей фотоприймача. Обмеженість смуги пропускання приводить до згладжування сигналу біля його максимумів та мінімумів (рисунок 4.3, в).
Окрім того, при малих площах отвору, через який світло попадає на
фоточутливий шар фотодіодів, похибка виготовлення отвору діафрагми та елементів модулятора обумовлює виникнення додаткової площі отвору, величина якої мало відрізняється від корисної площі, що значно впливає на точність перетворення кутової швидкості в інформативний параметр сигналу (рисунок 4.3, а). При більших площах отвору, через який світловий потік попадає на фоточутливий шар фотодіодів, вище описане явище проявляється значно менше (рисунок 4.3, б), тобто:
![]() , (4.9)
, (4.9)
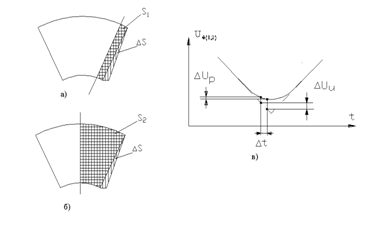
Рисунок 4.3 - Виникнення похибки первинного перетворення
Похибка, обумовлена цим фактором проявляється біля мінімумів імпульсів напруги на виході фотоприймача. На рисунку 4.3, в показано мінімум вихідної напруги фотоприймача. Суцільною лінією показано реальний випадок, пунктирною — ідеальний.
В розробленому ПВПКК використовується два фотоприймача на основі пари фотодіод - операційний підсилювач, а знімання вимірювальної інформації, з метою виключення проявлення двох вище вказаних факторів, здійснюється з виходу того фотоприймача, вихідний сигнал якого не знаходиться біля свого максимуму чи мінімуму. На рисунку 4.4 наведено функціональну схему ПВПКК, а на рисунку 4.5 наведено часові діаграми його роботи у точках, вказаних на рисунку 4.4.
Перед початком вимірювання, модулятор розташовується відносно діафрагми випадково. При відповідному підборі значень напруг джерел опорної напруги Р1 та Р2, які визначають коломінімумну та коломаксимумну область вихідних сигналів фотоприймачів 1 та 2, можливі їх слідуючи два стани перед початком вимірювань - жоден з вихідних сигналів фотоприймачів не знаходиться на рівні, який відповідає знаходженню його біля свого максимуму чи мінімуму або навпаки.
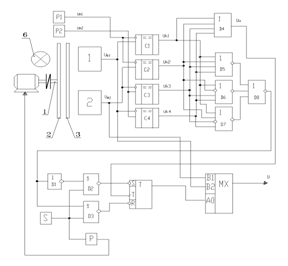
Рисунок 4.4 - Схема електрична функціональна ПВПКК з зменшенням похибки, що обумовлена частотними властивостями фотоприймача.
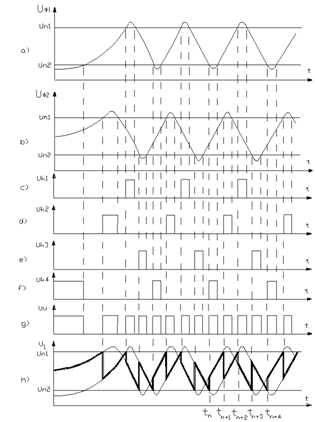
Рисунок 4.5 – Часові діаграми роботи ПВПКК
В таблиці 4.1. наведено всі можливі значення вихідних напруг всіх компараторів (В — високий рівень, Н — низький рівень) перед початком роботи. Високий рівень свідчить про знаходження вихідного сигналу відповідного фотоприймача у своїй коломаксимумній чи коломінімумній області. У двох нижніх строках таблиці 4.1 знаком "+" відмічено той фотоприймач, вихідний сигнал якого при наведеному стані компараторів не знаходиться у своїй коломаксимумній чи коломінімумній області. Після включення джерела освітлення, формувачем сигналу "Скид" S (рисунок 4.4) формується сигнал "Скид", який уявляє собою імпульс напруги рівня логічної одиниці, який подається на входи елементів І-НІ, D2 та D3. За заднім фронтом сигналу "Скид" спрацьовує схема запуску об’єкту Р.
Таблиця 4.1 - Початкові значення вихідних напруг компараторів
|
Компаратори та їх вихідні напруги |
Номер стану | |||||
| Компаратор | Напруга | 1 | 2 | 3 | 4 | 5 |
| C1 |
Uk1 |
Н | В | Н | Н | Н |
| C2 |
Uk2 |
Н | Н | Н | Н | В |
| C3 |
Uk3 |
Н | Н | В | Н | Н |
| C4 |
Uk4 |
Н | Н | Н | В | Н |
| Фотоприймач 1 | + | - | + | - | + | |
| Фотоприймач 2 | + | + | - | + | - |
Перед початком
вимірювань необхідно на вихід ПВПКК подати сигнал з виходу того фотоприймача,
вихідний сигнал якого не знаходиться у своїй коломаксимумній чи коломінімумній
області. Для цієї передустановки служать логічні елементи АБО-НІ D5 — D8, елемент
НІ D1, елементи І-НІ D2-D3. Коли компаратори знаходяться у станах 1, 3 або 5
(таблиці 4.1), на виході елементу D8 АБО-НІ з’являється рівень логічного нуля.
При цьому, під час дії сигналу "Скид", на виході елементу D2 І-НІ
з’явиться рівень логічного нуля, а на виході елементу D3 І-НІ — рівень логічної
одиниці. Лічильний тригер Т встановиться в одиницю і до виходу перетворювача
буде підключено вихідний сигнал фотоприймача 1. При любих інших станах на
компараторі до виходу перетворювача буде підключено вихідний сигнал
фотоприймача 2. По задньому фронту сигналу "Скид" спрацьовує схема
запуску об’єкту дослідження Р і запускається об’єкт, кутову швидкість якого
треба виміряти. Коли сигнал "Скид" відсутній, напруга на
установочному вході та вході скиду тригера Т завжди буде рівня логічної одиниці
і не буде впливати на його стан. При обертанні вала об’єкта дослідження,
трикутні імпульси напруги, які формуються на виході фотоприймачів (рисунок 4.5,
a, b), зрівнюються з напругами
джерел опорної напруги Р1 та Р2, відповідно Uп1 та Uп2.
При співпаданні, на виході одного з компараторів з’являється імпульс позитивної
полярності (рисунок 4.5, c, d, f, g). Його тривалість дорівнює
тривалості знаходження рівня вихідної напруги фотоприймача вище рівня Uп1
чи Uп2. Вихідні імпульси кожного з компараторів подаються на входи
елементу D4 АБО, з виходу якого (рисунок 4.5, h) вони поступають на тактовий вхід
лічильного тригеру Т, який змінює свій стан по передньому фронту цих імпульсів,
відповідно керуючи аналоговим мультиплексором МХ, підключаючи до виходу датчика
вихідний сигнал того фотоприймача, який не знаходиться у своїй коломінімумній
чи коломаксимуній області. На виході датчика формується сигнал, який на рисунку
4.5, j показано жирною лінією.
Знаходимо рівняння перетворення ПВПКК з зменшенням похибки, що обумовлена
частотними властивостями фотоприймача. Залежність вихідної напруги першого
фотоприймача від кута повороту описується виразом (4.8). Другий фотоприймач зсунутий відносно першого на кут 1,5![]() . Його вихідна напруга:
. Його вихідна напруга:
 , (4.10)
, (4.10)
Вирази (4.8) та (4.10) описують рівняння перетворення цього ПВПКК.
В якості операційного підсилювача у складі лінійних фотоприймачів доцільно використати мікросхему операційного підсилювача К544УД2. Обрана мікросхема операційного підсилювача К544УД2 має наступні електричні параметри [10]:
- напруги живлення +/-15 В;
- опір навантаження 2 кОм;
- вхідна напруга 10 В;
- струм споживання 3,5 мА;
- коефіцієнт підсилення 35 106;
- частота одиничного підсилення 1 Мгц;
- вхідний опір 10 106 Ом;
- вхідний струм 0, 15 мА;
- ємність навантаження 500 пФ.
Фотодіод VD1 повинен відповідати наступним вимогам :
- мати велику площину фоточутливого слою, що значно спростить конструкцію перетворювача;
- мати малу постійну часу, що буде обумовлювати широкий частотний
діапазон.
Цим вимогам відповідає фотодіод ФД-155К який має наступні параметри:
- площина фоточутливого слою - 30 мм2;
- постійна часу - 10-6 с.
До складу ПВПКК, як було вказано вище, входить компаратор напруг. Обираємо компаратор К521СА3, який має наступні характеристики:
- час переключення 30 нс;
- струм споживання 3,5 мА;
- коефіцієнт підсилення 35 106;
- частота одиничного підсилення 1 МГц;
- вхідний опір 10 106 Ом;
Тому як на його виході треба формувати імпульси ТТЛ рівня, використовуємо для нього однополярне джерело живлення +5В. Опорну напругу точно виставити можна тільки при настройці фотоприймача, тому для цього використовується резистор змінного опору.
У графічній частині дипломного проекту наведено електричну принципову схему ПВПКК та його збірне креслення.
4.2 Розробка пристрою спряження перетворювача з ПЕОМ
Схему спряження реалізовано на базі 12-розрядного АЦП AD1671 фірми Analog Devices, яка має вбудований пристрій вибірки зберігання та час перетворення 800 нс, порту уведення-виведення КР580ВВ55А.
Мікросхема КР580ВВ55 уявляє собою програмований порт, який включає в себе три двунаправлених порти. Генератор з кварцевою стабілізацією частоти, що запускає АЦП, запускається програмно через порт С, коли в нього записується керуюче слово «початок». Вихідний сигнал генератору блокується керуючим словом «кінець».
Для ініціалізації порту уведення-виведення використовуються виводи
системної шини ЕОМ А2-А9 та системний сигнал AEN, який свідчить про те, що відбувається звернення до зовнішнього пристрою, а не до пам’яті. Виводи А0-А1 використовуються для вибору напрямку передачі чи зчитування інформації.
Для завдання режимів роботи порту - режиму програмування, режиму запису в порт, режиму уведення в порт, використовуються системні сигнали RD та WR. Порт уведення-виведення ініціалізується при появі на системній шині адрес $100-$103. Призначення цих адресів наведено у таблиці 4.2.
Сигнал готовності АЦП є запитом на переривання IRQ10, під час обробки якого зчитується перший та другий байт вихідного коду АЦП і записується в оперативну пам’ять.
Таблиця 4.2 - Адреси портів
| Адреса | Порт |
| $100 | порт А |
| $101 | порт В |
| $102 | порт С |
| $103 | Програмування порту |
Через порт уведення-виведення здійснюється передавання першого байту вихідного коду АЦП (порт А), передавання другого байту вихідного коду АЦП та сигналу наявності заднього фронту вихідного сигналу ТП (порт В), сигналів початку та закінчення вимірювань (порт С). Дані під час роботи безперервно записуються в оперативну пам’ять персональної ЕОМ.
Схему керування портом уведення-виведення реалізована на мікросхемах DD1, DD2, DD3, DD5. Це мікросхеми 555 серії : DD1 - К555ЛН1; DD2 - К555ЛН1; DD3 - К555ЛА3; DD5 - К555ЛА2.
Електрична принципова схема блоку спряження з ПЕОМ наведена у графічній частині дипломного проекту.
5. Електричні розрахунки
5.1 Розрахунок компаратора напруг
Компаратор напруг реалізовано на мікросхемі К521СА3, яка має вихід з відкритим колектором, що обумовлює використання зовнішнього опору навантаження. Його електричну принципову схему наведено на рисунку 5.1.
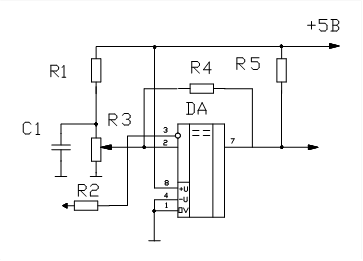
Рисунок 5.1 - Компаратор напруг
При використанні однополярного живлення +5 В та для отримання на виході сигналів ТТЛ рівня при роботі на високоомне навантаження, необхідно використати резистор опором 1 кОм [11]. Обираємо резистор С2-23 - 1 кОм.
Елементи R7 C3 є елементами фільтру за джерелом живлення. Стандартні значення цих елементів R7 = 100 Ом, C3 1 мкФ. Обираємо резистор С2-23 - 100 Ом та конденсатор К-42-П-5-1 мкФ.
Для встановлення значення опорної напруги обираємо резистор СП5 - 10 кОм.
Резистори R8 та R10 служать для узгодження вхідних опорів попереднього пристрою з послідуючим. Обираємо С2-23 - 100 кОм.
5.2 Електричний розрахунок генератора прямокутних імпульсів, що запускає АЦП
Схема електрична принципова генератора прямокутних імпульсів з кварцевою стабілізацією частоти наведена на рисунку 5.2.
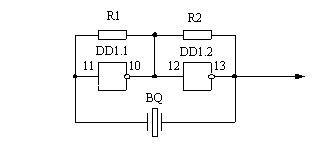
Рисунок 5.2 - Схема електрична принципова генератора прямокутних імпульсів з кварцевою стабілізацією частоти
У відповідності з [12], для того, щоб вивести в лінійний режим логічні елементи К555ЛН1 необхідно використати резистори опором 500 Ом. Тому обираємо резистори R1 та R2 С2-23 - 520 Ом.
Для того, забезпечити стійку роботу пристрою, щоб АЦП міг перетворити миттєве значення напруги не раніш ніж з’явиться наступний імпульс його запуску, необхідно частоту генератору вибрати на порядок менше ніж частота дискретизації АЦП. Тому обираємо кварцевий резонатор РК86 - 100 кГц.
5.3 Електричний розрахунок лінійних фотоприймачів
Схему електричну принципову лінійного фотоприймача на основі пари фото діод - операційний підсилювач наведено на рисунку 5.3.
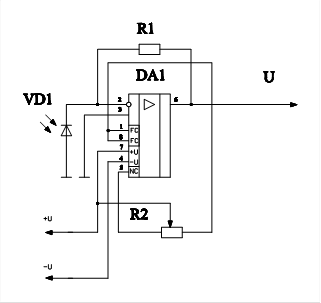
Рисунок 5.3 - Схема електрична принципова лінійного фотоприймача на основі пари фотодіод - операційний підсилювач
Розрахуємо номінали елементів лінійних фотоприймачів. Для обох фотоприймачів використовується одне і те саме джерело світла, яке має конденсорну лінзу, що дозволяє забезпечити рівномірний світловий потік по всій освітлюємій поверхні.
При настройці тахометричного перетворювача шляхом регулювання сили світла підбирається необхідний рівень вихідної напруги фотоприймача. Він повинен дорівнювати 5 В, тому як на такий вхідний сигнал розрахований аналого-цифровий перетворювач AD1671, який використовується у розробляємому пристрої.
Номінальний фотострум фотодіоду ФД-24К дорівнює 100 мкА.
Обчислюємо опір резистора R3 (див. графічну частину):
![]() 50 кОм (5.1)
50 кОм (5.1)
Обираємо резистор С2-23 - 52 кОм.
Задаємось вихідною напругою лінійного фотоприймача, що виконує функції детектору заднього фронту U=5В. Номінальний фотострум фотодіоду дорівнює 50 мкА. Знаходимо опір резистора R5:
![]() 100 кОм (5.2)
100 кОм (5.2)
Обираємо резистор С2-23 - 100 кОм.
В якості балансировочних резисторів обираємо резистори СП-5 – 150 кОм у відповідності з рекомендаціями [19].
6/ Розробка схеми програми роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом та програмного забезпечення
6.1 Розробка схеми програми роботи пристрою
Розробку алгоритмічного та програмного забезпечення при вирішенні подібного типу задач вже можна починати при завершенні розробки функціональних схем апаратної частини.
Якщо задача на розробку поставлена, то для отримання алгоритму роботи пристрою необхідно виконати ряд послідовних дій [16]:
- детальний опис задачі;
- аналіз задачі;
- інженерну інтерпретацію задачі;
- розробку загального алгоритму функціонування;
- розробку деталізованих алгоритмів;
- розподілення робочих регістрів та пам'яті ЕОМ;
Після ввімкнення живлення відбувається початкова ініціалізація системи, тобто автоматичне скидання порту та обнулення його внутрішніх регістрів.
Після цього в порт записується керуюче слово, за яким імпульси з виходу генератора з кварцевою стабілізацією поступають на вхід запуску аналого-цифрового перетворювача. Після появи першого імпульсу формується запит на переривання, після чого проводиться очікування сигналу готовності АЦП.Після появи сигналу готовності АЦП перший байт його вихідного коду записується до порту. З порту він зчитується та записується в ОЗУ. Лічильник числа зчитувань з АЦП збільшується на одиницю. Після цього до ОЗУ заноситься другий байт даних.
Після цього обчислюється поточне значення часу за формулою:
![]() , (6.1)
, (6.1)
де ![]() - оптимальний період
сигналу тактового генератора.
- оптимальний період
сигналу тактового генератора.
Далі перевіряється, чи не перша це вибірка. Якщо перша, то здійснюється перехід на початок програми та зчитується друге слово з АЦП. Якщо вибірка не перша - обчислюється кутова швидкість за виразом:
![]() (6.2)
(6.2)
Значення кутової швидкості, кута
повороту, поточного часу записується до файлу чи виводиться на екран монітору,
а програма перевіряє, чи нема сигналу кінця вимірювань. Якщо його нема,
здійснюється перехід на початок програми. Момент інерції роторної системи є одним з найважливіших її параметрів,
що необхідно контролювати під час будь-яких випробувань. При наявності вимірювальної
інформації про момент інерції та швидкісну діаграму об’єкту контролю можливе
визначення динамічного моменту та моменту опору на валу. Визначення моменту
інерції традиційними методами є складним та трудомістким процесом. Непряме
визначення моменту інерції через вимірювання амплітуди крутильних коливань дає
змогу автоматизувати його. Розглянемо рисунок 6.1, на якому наведено залежності
кута повороту від часу при постійному значенні кутової швидкості та відсутності
крутильних коливань ![]() та при наявності
крутильних коливань
та при наявності
крутильних коливань ![]() . Залежність кута
повороту від часу в усталеному режимі роботи об’єкту контролю можна записати:
. Залежність кута
повороту від часу в усталеному режимі роботи об’єкту контролю можна записати:
![]() , (6.3)
, (6.3)
де ![]() - середнє значення кутової
швидкості,
- середнє значення кутової
швидкості,
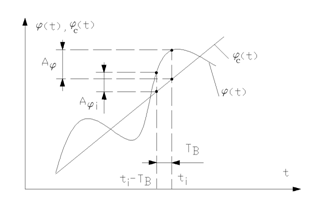
Рисунок 6.1 – До визначення моменту інерції ротора синхронної гістерезисної електричної машини з газомагнітним підвісом
Значення тангенсу
кута нахилу прямої ![]() , який дорівнює
середньому значенню кутової швидкості, визначається шляхом багаторазових
визначень миттєвого значення кута повороту та послідуючого знаходження
середньоарифметичного значення похідної сигналу при роботі об’єкту в усталеному
режимі. Середнє значення кутової швидкості визначається виразом:
, який дорівнює
середньому значенню кутової швидкості, визначається шляхом багаторазових
визначень миттєвого значення кута повороту та послідуючого знаходження
середньоарифметичного значення похідної сигналу при роботі об’єкту в усталеному
режимі. Середнє значення кутової швидкості визначається виразом:
![]() , (6.4)
, (6.4)
де n - кількість визначених значень кутової швидкості; ТВ - крок дискретизації.
Складова виразу
(6.2) ![]() має коливальний характер
та залежить від наступних причин [40]:
має коливальний характер
та залежить від наступних причин [40]:
- змінні електромагнітні сили в об’єкті контролю;
- несинусоїдальності розподілу магнітної індукції вздовж зазору;
- нерівномірності магнітної провідності вздовж осей;
- змінні механічні сили в об’єкті контролю;
- дисбаланс ротору, що приводить до виникнення змінних динамічних сил;
- зміна температури;
- місцеві деформації та гальмівні моменти;
- зовнішні фактори, що впливають на ступінь нерівномірності обертання ротора;
- коливання напруги живлення та значення навантаження;
- несиносоїдальність напруги живлення, нестабільність її частоти;
Для ЕМ з газомагнітним підвісом конічного ротору, домінуючою причиною, що обумовлює виникнення крутильних коливань є дисбаланс ротора. У цьому випадку, при умові знехтування іншими причинами виникають крутильні коливання:
![]() , (6.5)
, (6.5)
Величина ![]() , яка дорівнює різниці між
значеннями кута повороту з урахуванням крутильних коливань та без їх
урахування, визначається виразом:
, яка дорівнює різниці між
значеннями кута повороту з урахуванням крутильних коливань та без їх
урахування, визначається виразом:
![]() . (6.6)
. (6.6)
Для знаходження амплітуди крутильних коливань доцільно скористатись сплайн-інтерполяцією з послідуючим знаходженням середнього значення максимумів та мінімумів інтерполяційного сплайну.
Позначимо
інтерполяційний сплайн через ![]() . Тоді
амплітуда крутильних коливань визначається як середнє арифметичне модулів
максимумів та мінімумів інтерполяційного сплайну:
. Тоді
амплітуда крутильних коливань визначається як середнє арифметичне модулів
максимумів та мінімумів інтерполяційного сплайну:
![]() , (6.7)
, (6.7)
де КMAX, КMIN - кількість максимумів та мінімумів інтерполяційного сплайну. Завдання знаходження максимумів та мінімумів інтерполяційного сплайну легко розв’язується відомими методами. Момент інерції визначається за виразом:
![]() (6.8).
(6.8).
Схему програми, що відповідає вище описаному алгоритму, наведено у графічній частині дипломного проекту.
6.2 Розробка програмного забезпечення
Розроблене програмне забезпечення, під управлінням якого працює пристрій контролю середнього значення кутової швидкості, дозволяє реалізувати наступні режими роботи апаратних засобів : режим роботи за допомогою системи меню; графічне і табличне представлення результатів динамічного вимірювання кутової швидкості, кута повороту; безперервний контроль кутової швидкості; Ядром програмного забезпечення є основна програма, процедури апроксимації сплайнами, процедура диференціювання апроксимуючої функції, програмна підтримка процесів накопичення і представлення результатів вимірювання та контролю. Завдяки наявності системи меню, можливо вибрати один з двох режимів роботи: режим вимірювання швидкісних діаграм; режим вимірювання та контролю середнього значення кутової швидкості. Кожному з цих режимів відповідає своя підпрограма. Лістинг фрагменту програми, яка написана на алгоритмічній мові Turbo Pascsl 7.0, у відповідності зі схемою програми, наведений у додатку.
7. Розрахунок похибок вимірювання комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
7.1 Розрахунок похибок вимірювання моменту інерції
Похибка вимірювання моменту інерції складається з похибок вимірювання параметрів, що входять до виразу (6.8).
Складовими похибки вимірювання моменту інерції ротору є :
- похибка вимірювання маси ротору;
- похибка вимірювання радіального зміщення ротору;
- похибка вимірювання амплітуди крутильних коливань.
Похибка вимірювання моменту інерції є функцією вище названих випадкових величин. Маса ротору є його паспортною величиною і як правило відома з високою точністю, тому можна вважати, що похибка вимірювання маси ротору не впливає на результат вимірювання його моменту інерції. Похибка вимірювання радіального зміщення ротору за методикою, що розглянуто у [12], складається з похибки вимірювання ексцентриситету маси, власної резонансної частоти системи, похибки вимірювання кутової швидкості, похибки, що обумовлена наближеністю розрахункового виразу, похибки, що обумовлена вібраціями та багатьох інших, серед яких важко виділити домінуючу складову. Це дає змогу вважати, що ця похибка розподілена за нормальним законом.
Похибка вимірювання амплітуди крутильних коливань складається з похибки квантування, похибки інтерполяції, похибки, що обумовлена випадковими завадами та неточністю виготовлення модулятору та діафрагми та інше.
При багаторазових вимірюваннях з послідуючим усередненням цю похибку можна значно зменшити [13]. Припустимо, що вона настільки мала у порівняні з похибкою вимірювання радіального зміщення ротору, що нею можна знехтувати.
Позначимо через ![]() абсолютну похибку
вимірювання радіального зміщення ротора. Вираз (6.8) можна записати як:
абсолютну похибку
вимірювання радіального зміщення ротора. Вираз (6.8) можна записати як:
![]() , (7.1)
, (7.1)
де ![]() - абсолютна похибка
вимірювання моменту інерції ротору. Після нескладних перетворень отримуємо:
- абсолютна похибка
вимірювання моменту інерції ротору. Після нескладних перетворень отримуємо:
![]() . (7.2)
. (7.2)
Квадрат
абсолютної похибки вимірювання радіального зміщення ротору є малою величиною
другого порядку малості, тобто ![]() . Це
дає змогу записати приблизний вираз для абсолютної похибки вимірювання моменту
інерції ротора:
. Це
дає змогу записати приблизний вираз для абсолютної похибки вимірювання моменту
інерції ротора:
![]() . (7.3)
. (7.3)
З робіт [14, 15], витікає, що відносна похибка вимірювання радіального зміщення ротора не перевищує 5%, тобто можна записати:
![]() , (7.4)
, (7.4)
де ![]() - максимальне значення
похибки вимірювання радіального зміщення. Після нескладних перетворень
отримуємо:
- максимальне значення
похибки вимірювання радіального зміщення. Після нескладних перетворень
отримуємо:
![]() , (7.5)
, (7.5)
де ![]() - максимальне значення
абсолютної похибки вимірювання моменту інерції.
- максимальне значення
абсолютної похибки вимірювання моменту інерції.
З виразу (7.5 )
випливає, що абсолютна похибка вимірювання моменту інерції не перевищує 10 %.
Так як прийнято, що похибка ![]() має
нормальний закон розподілу, такий самий закон розподілу має і похибка
вимірювання моменту інерції. Він описується виразом:
має
нормальний закон розподілу, такий самий закон розподілу має і похибка
вимірювання моменту інерції. Він описується виразом:
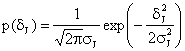 , (7.6)
, (7.6)
де ![]() - середньоквадратичне
відхилення абсолютної похибки вимірювання моменту інерції.
- середньоквадратичне
відхилення абсолютної похибки вимірювання моменту інерції.
7.2 Розрахунок похибки вимірювання кутової швидкості
Для визначення кутової швидкості необхідно диференціювати вихідний сигнал ТП. В загальному випадку результуюча похибка дискретного вимірювання кутової швидкості має наступні складові [16]: методична похибка; похибка інтерполяції; похибка, що обумовлена похибкою одного відліку АЦП; похибка, що обумовлена випадковими завадами та неточністю виконання модулятору та діафрагми.
Методична похибка дискретного вимірювання кутової швидкості в момент ti визначається виразом:
![]() , (7.7)
, (7.7)
де ![]() - час між відліками
вихідного сигналу ТП;
- час між відліками
вихідного сигналу ТП;
![]() - значення кута повороту в
моменти часу
- значення кута повороту в
моменти часу ![]() та
та ![]() .
.
У випадку, коли
кутове прискорення дорівнює нулю (кутова швидкість постійна), методична похибка
відсутня. Для оцінки методичної похибки використаємо методику, що застосовано у
[16]. Припустимо, що усі інші похибки, окрім методичної, відсутні. Вважаємо
вихідний сигнал ТП гладкою функцією часу, яка у любій точці розкладається у ряд
Тейлора. Якщо розкласти ![]() біля
точки
біля
точки ![]() в ряд Тейлора, обмежившись
трьома членами ряду, отримуємо:
в ряд Тейлора, обмежившись
трьома членами ряду, отримуємо:
![]() , (7.8)
, (7.8)
де ![]() - точка між
- точка між ![]() та
та ![]() . Після нескладних
перетворень отримуємо:
. Після нескладних
перетворень отримуємо:
![]() . (7.9)
. (7.9)
Максимальна оцінка методичної похибки вимірювання кутової швидкості:
![]() , (7.10)
, (7.10)
де ![]() - максимальне значення
другої похідної вихідного сигналу ТП на інтервалі диференціювання, виражене у
одиницях кутового прискорення. Значення
- максимальне значення
другої похідної вихідного сигналу ТП на інтервалі диференціювання, виражене у
одиницях кутового прискорення. Значення ![]() обумовлене
не тільки режимом роботи об’єкту контролю, а й імпульсними завадами у вихідному
сигналі ТП:
обумовлене
не тільки режимом роботи об’єкту контролю, а й імпульсними завадами у вихідному
сигналі ТП:
![]() , (7.11)
, (7.11)
де ![]() - коефіцієнт, який зворотно
пропорційний крутизні залежності вихідної напруги ТП від кута повороту.
- коефіцієнт, який зворотно
пропорційний крутизні залежності вихідної напруги ТП від кута повороту.
Цей коефіцієнт дорівнює:
![]() . (7.12)
. (7.12)
Провівши
аналогічні перетворення, можна довести, що методична похибка на початку
інтервалу диференціювання дорівнює методичній похибки на кінці інтервалу. Якщо
виникає необхідність подальшої обробки даних, тобто запізнення вимірювальної
інформації не важливе, можна визначити методичну похибку із запізненням на ![]() . В цьому випадку, у
відповідності з [16]:
. В цьому випадку, у
відповідності з [16]:
![]() . (7.13)
. (7.13)
Цю оцінку можливо використовувати при обробці даних вимірювання з використанням інтерполяції. Вище наведені розрахунки справедливі тільки для диференціаторів першого типу. Для диференціаторів другого типу, у відповідності з [16], оцінка максимальної методичної похибки має вигляд:
![]() , (7.14)
, (7.14)
а для диференціатору третього типу:
 . (7.15)
. (7.15)
Диференціатори другого та третього типу мають більш високу завадостійкість, ніж диференціатор першого типу. Але вони мають більший інтервал диференціювання. Максимальна оцінка методичної похибки диференціатору першого типу прямо пропорційна максимальному значенню другої похідної вихідної напруги ТП та часу ТВ. Значення другої похідної вихідної напруги в загальному випадку є випадковою величиною, яка залежить від багатьох факторів. На неї впливають кутове прискорення, випадкові завади, резонансні явища, що обумовлені муфтою спряження, співвідношення моментів на валу, прецесія та нутація ротору, неточність виконання прорізів модулятору та діафрагми та інше. У роботі [18] доведено, що якщо виходити з режиму роботи об’єкту контролю з максимальними динамічними моментами (максимальне навантаження, максимальна швидкодія), закон розподілу максимального кутового прискорення буде наближатись до дискретного двомодального. У цьому випадку, закон розподілу методичної похибки диференціатору першого типу, має також дискретний двомодальний закон розподілу:
![]() . (7.16)
. (7.16)
Середньоквадратичне відхилення методичної похибки:
![]() . (7.17)
. (7.17)
Для вимірювання швидкісних діаграм та проведення динамічних вимірювань кутової швидкості необхідно знаходити виміряні значення між точками опитування. Для цього використовують інтерполяцію. При цьому виникає похибка інтерполяції. Оцінки інтерполяції розглянуто у [12]. Так стосовно до диференціатора першого типу похибка східчастої інтерполяції оцінюється виразом:
![]() . (7.18)
. (7.18)
При використанні лінійної інтерполяції оцінка похибки має вигляд:
 . (7.19)
. (7.19)
При використанні
інтерполяції кубічними сплайнами, можна використовувати точні або асимптотично
точні оцінки похибок сплайн-інтерполяції на класах функцій [13]. Всі вони
достатньо складні для використання, тому в даному випадку доречно обмежитись
тільки порядковими оцінками похибок. Якщо функція ![]() належить
класу
належить
класу ![]() функцій, неперервних на
функцій, неперервних на ![]() і, що мають неперервні
похідні до k - того порядку (k = 0, 1, 2, 3, 4), то для похибки інтерполяції
кубічним сплайном s(t) функції та її похідних дійсні оцінки:
і, що мають неперервні
похідні до k - того порядку (k = 0, 1, 2, 3, 4), то для похибки інтерполяції
кубічним сплайном s(t) функції та її похідних дійсні оцінки:
![]() (7.20)
(7.20)
де с - невід’ємна константа;
![]() . (7.21)
. (7.21)
Ns -
число відліків. Для функції ![]() порядок
наближення
порядок
наближення ![]() сплайном s(t) дорівнює
сплайном s(t) дорівнює ![]() , порядок наближення
похідної
, порядок наближення
похідної ![]() , дорівнює
, дорівнює ![]() та буде складати малу
величину у порівнянні з іншими похибками.
та буде складати малу
величину у порівнянні з іншими похибками.
Розглянемо похибку визначення кутової швидкості, що обумовлена похибкою квантування вихідного сигналу ТП. Припустимо, що методична похибка визначення кутової швидкості та похибка визначення кута повороту, що обумовлена неточністю виконання модулятору та діафрагми відсутні. Тоді результат вимірювання можливо записати у вигляді:
![]() , (7.22)
, (7.22)
де ![]() - виміряне значення
кутової швидкості у момент часу
- виміряне значення
кутової швидкості у момент часу ![]() ;
;
![]() ,
, ![]() -
значення кута повороту у моменти часу
-
значення кута повороту у моменти часу ![]() та
та
![]() ;
;
![]() ,
, ![]() -
похибка вимірювання кута повороту, що обумовлена квантуванням вихідного сигналу
ТП, у моменти часу
-
похибка вимірювання кута повороту, що обумовлена квантуванням вихідного сигналу
ТП, у моменти часу ![]() та
та ![]() .
.
Друга частина виразу (7.22) є похибкою вимірювання кутової швидкості, що виникає внаслідок наявності похибки квантування вихідного сигналу ТП:
![]() . (7.23)
. (7.23)
Є очевидним, що
закон розподілу похибки вимірювання кутової швидкості, що обумовлена похибкою
квантування можна визначити як композицію законів розподілу величин ![]() та
та ![]() , які як і похибка квантування
мають рівномірний закон розподілу. При умові стаціонарності випадкових
процесів, що обумовлюють виникнення цих похибок, їх закони розподілу можна
вважати однаковими:
, які як і похибка квантування
мають рівномірний закон розподілу. При умові стаціонарності випадкових
процесів, що обумовлюють виникнення цих похибок, їх закони розподілу можна
вважати однаковими:
 . (7.24)
. (7.24)
У відповідності з [19] композиція двох однакових прямокутних законів є трикутний закон (розподіл Сімпсона). Закон розподілу похибки вимірювання кутової швидкості, що обумовлена квантуванням вихідного сигналу ТП [14]:
 . (7.25)
. (7.25)
Середньоквадратичне значення цієї похибки:
![]() . (7.26)
. (7.26)
Випадкова похибка вимірювання кутової швидкості виникає під впливом випадкових завад та неточності виконання прорізів модулятору та діафрагми. Будемо вважати заваду на вході диференціатору першого типу стаціонарною випадковою функцією. Припустимо, що методична похибка визначення кутової швидкості та похибка квантування відсутні. Тоді результат вимірювання кутової швидкості можливо записати у вигляді:
![]() . (7.27)
. (7.27)
Друга частина виразу (7.27) є похибкою вимірювання кутової швидкості, що виникає внаслідок наявності похибки квантування вихідного сигналу ТП:
![]() . (7.28)
. (7.28)
Визначимо закон
розподілу похибки вимірювання кутової швидкості, що обумовлена неточністю
виконання модулятору та випадковими завадами. Цей закон можна визначити як
композицію законів розподілу випадкових величин ![]() та
та
![]() , які мають нормальний
закон розподілу. При умові стаціонарності випадкових процесів, що обумовлюють
виникнення цих похибок, їх закони розподілу можна вважати однаковими:
, які мають нормальний
закон розподілу. При умові стаціонарності випадкових процесів, що обумовлюють
виникнення цих похибок, їх закони розподілу можна вважати однаковими:
![]() . (7.29)
. (7.29)
У відповідності з [10] композиція двох однакових нормальних законів є також нормальним законом, який визначається виразом:
 . (7.30)
. (7.30)
В силу властивостей стаціонарності [15], середньоквадратичне значення похибки вимірювання кутової швидкості, що обумовлена випадковими завадами та неточністю виконання модулятору та діафрагми:
![]() . (7.31)
. (7.31)
Середньоквадратичне відхилення загальної похибки вимірювання кутової швидкості знаходиться з виразу:
 . (7.32)
. (7.32)
Графік відносного
середньоквадратичного значення похибки вимірювання кутової швидкості ![]() при різних значеннях
при різних значеннях ![]() , без урахування складової,
що обумовлена неточністю виконання прорізів модулятору та діафрагми, при
, без урахування складової,
що обумовлена неточністю виконання прорізів модулятору та діафрагми, при ![]() рад/с2, n=12
наведено на рисунку 7.1.
рад/с2, n=12
наведено на рисунку 7.1.
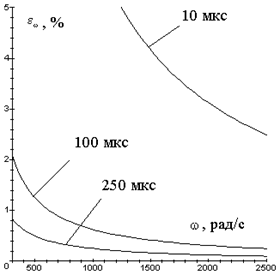
Рисунок 7.1 - Відносна середньоквадратична похибка вимірювання кутової швидкості.
Функція (7.26) має мінімум за аргументом ТВ, при якому результуюча середньоквадратична похибка вимірювання кутової швидкості мінімальна:
 . (7.33)
. (7.33)
Враховуючи, що ![]() , вираз (7.33) можна
записати як:
, вираз (7.33) можна
записати як:
 . (7.34)
. (7.34)
У випадку, коли похибкою, що обумовлена завадами та неточністю виконання модулятору та діафрагми можна знехтувати, вираз (7.34) прийме вигляд:
 . (7.35)
. (7.35)
Залежності ![]() від значення максимального
кутового прискорення об’єкту контролю при різній розрядності АЦП наведено на
рисунку 7.2.
від значення максимального
кутового прискорення об’єкту контролю при різній розрядності АЦП наведено на
рисунку 7.2.
|
Рисунок 7.2 - Оптимальний час диференціювання при різній розрядності АЦП |
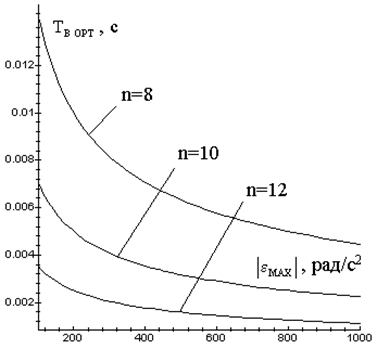
Мінімальна відносна середньоквадратична похибка вимірювання кутової швидкості при відсутності випадкових завад визначається виразом:
 . (7.36)
. (7.36)
Графіки
залежності цієї похибки від кутової швидкості при різній розрядності АЦП при ![]() рад/с наведено на рисунку
7.3. Їх наведено в діапазоні кутових швидкостей, в якому період дискретизації
як мінімум у два рази менше за період вихідного сигналу ТП.
рад/с наведено на рисунку
7.3. Їх наведено в діапазоні кутових швидкостей, в якому період дискретизації
як мінімум у два рази менше за період вихідного сигналу ТП.
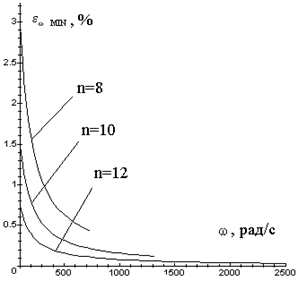
Рисунок 7.3 - Мінімальна відносна похибка вимірювання кутової швидкості
З аналізу рисунка 7.3. випливає, що в області низьких кутових швидкостей відносна середньоквадратична похибка вимірювання значно збільшується, що в першу чергу обумовлено похибкою квантування вихідного сигналу ТП.
8. Економічна частина
8.1 Розрахунок витрат на розробку і впровадження комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Кошторис витрат на розробку і впровадження нового технічного рішення включає розрахунок таких основних статей:
а) Основна заробітна плата розробників Зо, яка розраховується за формулою [21]:
![]() , (8.1)
, (8.1)
Проведемо розрахунок заробітної плати для кожного робітника, що приймає участь в розробці і занесемо отримані дані до таблиці 8.1.
Таблиця 8.1 Основна заробітна плата розробників
| Найменування посади | Місячний посадовий оклад, грн. | Оплата за робочий день, грн. | Число днів роботи | Витрати на заробітну плату, грн. |
| Керівник проекту | 385 | 17,5 | 22 | 385 |
| Інженер | 330 | 15 | 22 | 330 |
| Всього |
Зо=715 |
б) Витрати на основну заробітну плату робітників Зр, що виготовляють дослідний зразок.
Ці витрати розраховуються на основі норм часу, які необхідні для виконання даної роботи, за формулою:
![]() , (8.2)
, (8.2)
Сі визначається за формулою:
![]() , (8.3)
, (8.3)
Провівши розрахунки занесемо їх до таблиці 8.2.
Таблиця 8.2 – Витрати на основну заробітну плату робітників
| Найменування роботи |
Трудоміст - кість, н-годин |
Розряд роботи | Погодинна тарифна ставка, грн./год | Величина оплати, грн. |
| Виготовлення | 40 | 6 | 1,35 | 108 |
| Монтаж | 16 | 6 | 1,35 | 43,2 |
| Випробування | 24 | 3 | 1 | 48 |
| Всього |
Зр=199,2 |
в) Розрахуємо додаткову заробітну плату розробників та робітників, які були задіяні в розробці дослідного зразка. Вона становить 10¸12% від основної заробітної плати розробників та робітників, тобто 10 ¸ 12% від ( Зр + Зо ) :
Зд = 0,1 × ( Зр + Зо ) = 0,1 · (199,2 + 715) = 91,42 (грн.).
г) Нарахування на заробітну плату робітників Нзп розробників, які були задіяні в розробці дослідного зразка [21].
В 2002 році нарахування на заробітну плату Нзп складали 37,2 ¸ 40 % від суми основної та додаткової заробітної плати розробників та робітників, тобто Зо + Зр + +Зд.
Нзп = ( Зо + Зр + Зд ) · 0,375 = (715 + 199,2 + 91,42) · 0,375 = 377,1 (грн.).
д) Розрахуємо амортизацію основного обладнання, яке використовується для розробки, та приміщень.
Амортизаційні відрахування по кожному виду обладнання та приміщенням можуть бути розраховані за формулою:
![]() , (8.4)
, (8.4)
Для Т =1 ÷ 3 місяці.
Розраховуємо амортизаційні відрахування і занесемо отримані дані до таблиці 8.3.
Таблиця 8.3 Амортизація основного обладнання
| Найменування обладнання, приміщень | Балансо-ва вартість, грн. |
Норма аморти- зації, % |
Термін використання, міс. | Величина амортизаційних відрахувань, грн. |
|
|||||
| Робочий кабінет | 2000 | 5 | 1 | 8,3 |
|
|||||
| Комп’ютер | 1500 | 25 | 1 | 31,25 |
|
|||||
| Електро-двигунни | 200 | 25 | 1 | 4,2 |
|
|||||
|
Інструменти | 30 | 5 | 1 | 0,125 | |||||
|
Засоби вимірювальної техніки | 300 | 15 | 1 | 3,75 | |||||
|
Всього | А = 43,425 | ||||||||
е) Розрахунок оренди обладнання ( приміщень ), які були використанні в ході розробки пристрою та випробувань.
Оренда кожного виду обладнання (приміщень) розраховується за формулою:
![]() (8.5)
(8.5)
Всі проведені розрахунки заносимо до таблиці 8.4.
Таблиця 8.4 - Оренда обладнання та приміщень
| Найменування обладнання, приміщень | Балансова вартість, грн. | Ставка орендної плати, % |
Термін використан- ня, міс. |
Сума орендної плати, грн. |
| Робочий кабінет | 2000 | 5 | 1 | 8,3 |
| Засоби вимірювальної техніки | 300 | 5 | 1 | 1,25 |
| Всього | О = 9,55 |
ж) Підрахуємо витрати на матеріали, що були використані на розробку та виготовлення дослідного зразка за допомогою формули:
![]() (8.6)
(8.6)
Проведемо розрахунки і отримані дані занесемо до таблиці 8.5.
Таблиця 8.5 – Витрати на матеріали при розробці пристрою
| Наймену-вання матеріалу, марка, тип, сорт | Ціна за 1 кг, грн. | Витра-чено, кг |
Величи- на відходів, кг. |
Ціна відходів, грн./кг |
Возв- ратні відходи, грн. |
Вартість витраче- них матеріа- лів, грн. |
Каніфоль |
2 | 0,2 | 0,05 | 0,1 | - | 0,34 |
| Припой | 5 | 0,3 | 0,05 | 0,15 | - | 1,5 |
Всього |
М = 1,84 |
з) Розрахуємо витрати на комплектуючі К, що були використані при виготовленні дослідного зразка. Вони знаходяться за допомогою формули:
![]() (8.7)
(8.7)
Проведені розрахунки заносимо до таблиці 8.6.
Таблиця 8.6 Витрати на комплектуючі
| Найменування комплектуючих |
Кількість, шт |
Ціна за штуку, грн. | Сума, грн |
| Текстоліт електротехнічний листовий | 4 | 5,2 | 22,88 |
| Гайки | 20 | 0,5 | 11 |
| Шайби | 20 | 0,2 | 4,4 |
| Гвинти | 20 | 0,3 | 6,6 |
| Всього | К = 44,88 |
і) Витрати на силову електроенергію розраховується за формулою [21]:
![]() (8.8)
(8.8)
Отже, при підстановці відомих величин витрати на силову електроенергію будуть такі:
Ве = 0,156 ∙ 0,5 ∙ 528 ∙ 0,5 = 20,58 (грн.)
к) Інші витрати доцільно прийняти як 200 ¸ 300 % від суми основної заробітної плати розробників, тобто від :
Ві = (Зо + Зр) × 2 = (715 + 199,2) · 2 = 1828,4 (грн.).
з) Сума всіх попередніх витрат дає загальні витрати на розробку дослідного зразка В:
В = Зо + Зр + Зд + Нзп + А + О + М + К + Ве + Ві =
= 715 + 199,2 + 91,42 + 377,1 + 93,75 + 20,8 + 1,84 +
+ 97,9 + 20,58 + 1828,4 = 3331,395 (грн.).
Отже, загальні витрати на розробку дослідного зразка складають 3331,395 (грн.).
8.2 Розрахунок виробничої собівартості комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
З 1 січня 2001 року відповідно до "Положення бухгалтерського обліку 16 "Витрати" " основною обліковою одиницею є: "Виробнича собівартість". До виробничої собівартості продукції, робіт, послуг включаються:
- прямі матеріальні витрати;
- прямі витрати на оплату плати;
- інші прямі витрати;
- загальновиробничі витрати, які в свою чергу, поділяються на змінні та постійні. Постійні загальновиробничі витрати поділяються, в свою чергу, на розподілені та нерозподілені.
Виробнича собівартість є основною для формування ціни реалізації одиниці продукції. Решта витрат, такі як адміністративні витрати, витрати на збут та інші витрати операційної діяльності в собівартість продукції не включаються.
В зв’язку з цим, прогнозування виробничої собівартості одиниці продукції передбачає проведення наступних розрахунків, тобто визначення перерахованих нижче статей витрат:
а) Витрати на матеріали М, які розраховуються по кожному виду матеріалів за формулою:
![]() (8.9)
(8.9)
Розрахунки витрат на матеріали представлені в таблиці 8.5 розділу 8.1 і становлять М = 1,84 грн.
б) Витрати на комплектуючі К розраховуються за формулою:
![]() ,
(8.10)
,
(8.10)
Розрахунки витрат на комплектуючі представлені в таблиці 8.6 розділу 8.1 і становлять К = 44,88 грн.
в) Витрати на силову електроенергію розраховується за формулою:
![]() (8.11)
(8.11)
і становлять 20,58 грн. (формула 8.11).
г) Витрати на основну заробітну плату робітників Зр, що виготовляють дослідний зразок.
Ці витрати розраховуються на основі норм часу, які необхідні для виконання даної роботи, за формулою [21]:
![]() , (8.12)
, (8.12)
Сі визначається за формулою:
![]() , (8.13)
, (8.13)
Розрахунки витрат на основну заробітну плату робітників представлені в таблиці 8.2 розділу 8.1 і становлять Зр=199,2 грн.
д) Розрахуємо додаткову заробітну плату розробників та робітників, які були задіяні в розробці дослідного зразка. Вона становить 10¸12% від основної заробітної плати розробників та робітників, тобто 10¸12% від Зр :
Зд = 0,1 × Зр = 0,1 · 199,2 = 19,9 (грн.).
е) Нарахування на заробітну плату робітників Нзп розробників які були задіяні в розробці дослідного зразка.
В 2002 році нарахування на заробітну плату Нзп складали 37,2 ¸ 40 % від суми основної та додаткової заробітної плати розробників та робітників, тобто від суми Зр + Зд.
Нзп = ( Зр + Зд ) · 0,375 =
= ( 199,2 + 19,9 ) · 0,375 = 82,16 (грн.).
ж) Розрахунок загальновиробничих статей витрат. В загальному вигляді можна прийняти, що норматив загальновиробничих витрат складає 170 ¸ 200 % від основної заробітної плати робітників:
Взв = Зр · 1,7 = 199,2 · 1,7 = 338,64 (грн.).
з) Сума всіх попередніх статей витрат утворює виробничу собівартість одиниці продукції, яка підлягає продажу, Sв:
Sв = М + К + Ве + Зр + Зд + Нзп + ЗВ =
= 1,84 + 44,88 + 20,58 + 199,2 + 19,9 + 82,16 + 338,64 =
= 707,2 (грн.).
8.3 Розрахунок ціни реалізації нового технічного рішення
Визначення ціни реалізації об’єкта розробки буде здійснюватися на підставі аналізу ступеня конкурентності ринку.
Оскільки ринок конкурентний, то це означає, що виробнику важливо вплинути на ринкову ціну. Тому за ціну реалізації будемо приймати ринкову ціну на відповідні вироби з урахуванням значень конкретних показників якості нової розробки відносно до значень показників продукції конкурентів. При цьому використовуємо формулу:
![]() , (8.14)
, (8.14)
де значення W приймаємо в межах 30¸60, а Р – 20.
Підставивши значення SВ, розраховуємо значення ціни реалізації для нового пристрою:
![]() (грн.).
(грн.).
8.4 Розрахунок чистого прибутку для виробника
Для розрахунку величини чистого прибутку П, який може отримати виробник від реалізації нового пристрою за рік, можна скористатись формулою:
![]() . (8.15)
. (8.15)
На даному етапі розробки система розробляється, як експериментальний зразок, але в подальшому планується виробляти 25 ÷ 80 виробів на рік, тому чистий прибуток за рік буде таким:
![]() =
=
= 13068,16 (грн.).
Зрозуміло, що отримати такий прибуток можна тільки запустивши даний пристрій в серійне виробництво.
8.5 Розрахунок експлуатаційних витрат для нового пристрою
Оскільки планується, що виріб буде обслуговуватись інженерно – технічним
працівником, то приблизний склад експлуатаційних витрат та порядок їх розрахунку буде наступним:
а) Заробітна плата обслуговуючого персоналу Зобс, яка розраховується за формулами:
Зобс = 12 · М · b, (8.16)
Таким чином, заробітна плата обслуговуючого персоналу буде:
Зобс = 12 · 350 · 0,2 = 840 (грн. / рік).
б) Розрахуємо додаткову заробітну плату Зд розробників. Вона становить 10 ¸ 12 % від основної заробітної плати обслуговуючого персоналу:
Зд = Зобс · 0,1 = 840 · 0,1 = 84 (грн.).
в) Нарахування на заробітну плату Нзп обслуговуючого персоналу.
У 2002 році нарахування на заробітну плату складали 37,2 ¸ 40 % від суми основної та додаткової заробітної плати розробників, тобто Зобс + Зд.
В 2002 році ці нарахування складали:
- в Пенсійний фонд – 32%;
- в Фонд соціального страхування на випадок безробіття – 2,9 %;
- в Фонд соціального страхування по тимчасовій втраті працездатності – 2,1 %;
- в Фонд соціального страхування від нещасних випадків на виробництві і професійних захворювань України – від 0,2 % до 13,8 %;
Отже, нарахування на заробітну плату буде таким:
Нзп = (Зобс + Зд) · 0,375 = (840 + 84) · 0,375 = 346,5 (грн. / рік).
г) Витрати на силову електроенергію розраховуються за формулою:
Ве = В · П · Ф · Кп · b, (8.17)
Отже, витрати на силову електроенергію складатимуть:
Ве = 0,156 · 0,5 · 900 · 0,75 · 0,2 = 10,53 (грн. / рік).
д) Амортизаційні відрахування розраховуються за такою формулою:
![]() , (8.18)
, (8.18)
Отже, амортизаційні відрахування будуть складати:
![]() (грн./рік)
(грн./рік)
е) Витрати на ремонт пристрою можна розрахувати за формулою:
(8.19)
Отже, витрати на ремонт будуть такими:
![]() (грн. /
рік).
(грн. /
рік).
ж) Інші витрати розраховуються як 5 % ¸ 10 % від загальної суми усіх попередніх витрат [21]:
Ів = (Зобс + Зд + Нзп + Ве + А + Р) · 0,05 = 84,67 грн.
з) Сума витрат за всіма попередніми статтями дає величину експлуатаційних витрат для даного пристрою – Е2.
Е2 = Зобс + Зд + Нзп + Ве + А + Р + Ів = 1778,1 грн.
8.6 Розрахунок економічного ефекту на експлуатаційних витратах для споживача
Розрахунок економічного ефекту на експлуатаційних витратах для споживача від експлуатації нового пристрою визначається за формулою:
![]()
8.7 Розрахунок економічного ефекту на ціні для споживача від придбання нового пристрою
Розрахунок економічного ефекту на ціні для споживача від придбання нового пристрою проводяться за формулою:
![]() (грн.)
(грн.)
Результат має від’ємне значення, це означає, що споживач не буде мати економічного ефекту на ціні від придбання нового виробу, але це ще не говорить про неефективність нової розробки. Для цього потрібно розрахувати строк окупності додаткових витрат То на ціні для нового виробу за формулою:
![]()
Оскільки То = 1,3 і То < 1 ÷ 3, то розробка вважається економічно ефективною для споживача.
8.8 Розрахунок терміну окупності витрат
Термін окупності витрат То для виробника визначається за формулою:
![]() . (8.20)
. (8.20)
Звичайно, оскільки даний пристрій є дослідним зразком, то планується зробити один зразок для демонстрації. Зрозуміло, що при виробництві одного пристрою затрати на виробництво будуть значно більші ніж прибуток. Тому було розраховано попит продукції для вітчизняного ринку який становить 25 ÷ 80 пристроїв в рік, тоді термін окупності буде дорівнювати [21]:
![]()
З розрахунків видно То < 4 ¸ 5 років, тому розробка вважається економічно ефективною для виробника.
Отже провівши розрахунок економічної частини було встановлено, що загальні витрати на розробку і впровадження нового пристрою становлять 3331,39 грн. Також було спрогнозовано виробничу собівартість системи. Враховуючи дані розрахунки, а також беручи до уваги ціну конкурентів на подібну продукцію і розглянувши технологічні показники нового пристрою і аналога була встановлена ціна на виріб, яка становить 1103,23 грн. Провівши патентний пошук на виявлення подібних систем і дослідження вітчизняного ринку було встановлено, що схожі пристрої на Україні вже випускаються. Оскільки дану продукцію планується продавати тільки на території України, то було спрогнозовано попит на дану продукцію, він становить 25 пристроїв на рік. При такій реалізації заплановано отримувати 13068,16 грн. прибутку за рік. Також було встановлено, що користувач буде мати позиивнний економічний ефект від використання нової системи. При серійному виробництві термін окупності займає дуже малий термін, що також важливо при теперішньому економічному становищі.
9. Охорона праці
9.1 Характеристика об’єкта, що проектується
В даному дипломному проекті розробляється програмний пакет для керування адаптивними системами автоматичного управління. Даний програмний продукт розробляється на ЕОМ i буде використовуватись в машинних залах обчислювальної техніки. Об'єкт проектування реалізовується на обчислювальних машинах типу IBM PC з процесором не нижче Intel 486, якi представляють собою з'єднання системного блоку, клавіатури та терміналу (монітора), друкуючого пристрою (принтера).
9.2 Погіршення стану здоров’я користувачів ЕОМ, які пов’язані зі стресом
Робота за ВДТ пов’язана з впливом ряду стресогенних факторів: несприятливі умови та режими праці; зміст праці; здібності та потреби працівника, а також його сподівання; звички, культура організаційних моментів, умови життя, робота транспорту та ін.
Стресові впливи можуть стати причиною виникнення фізіологічних, психологічних змін та трансформації поведінки, розладів здоров’я.
Фізіологічні порушення можуть супроводжуватися розладами шлунково-кишкового тракту, м’язовим напруженням, змінами функцій серцево-судинної системи, пітливістю, виділенням підвищеного рівня катехоламінів, порушенням менструального циклу та ін [22].
Розлади шлунково-кишкового тракту та інші фізіологічні порушення частіше спостерігалися у користувачів з високою та середньою тривалістю роботи за ВДТ, ніж у членів контрольних груп та користувачів, які працювали за ВДТ менше 50% свого робочого часу.
До психологічних та поведінкових розладів, відзначених у літературі,
належить агресивність, фрустрація, нервозність, роздратування, тривога, нерішучість, пригніченість, занепокоєння, порушення сну, втрата апетиту, швидкий розвиток втоми, запаморочення та ін.
За даними ряду авторів, у користувачів ВДТ виникають психологічні та поведінкові порушення (тривога, роздратування, пригніченість), частота яких. коливається від 14 до 70%. Було встановлено, що повільне отримання відповіді від системи посилювало фрустрацію, роздратування та нетерпіння.
Великий вплив на вираженість цих симптомів має форма оплати праці. Наприклад, відрядна оплата праці сама по собі немає впливу на зміну настрою. Проте у сполученні з більш динамічною роботою вона призводила до посилення темпу роботи користувачів в порівнянні з тими, чия праця оплачується по твердій ставці. В сполученні з тривалим чеканням відповіді системи відрядна оплата праці призводила до посилення фрустрації та роздратованості. Таким чином, відрядна оплата праці у будь-якому випадку викликає підвищене відчуття дефіциту, часу.
Є відомості про існування позитивної кореляції між невдоволенням користувачів ВДТ деякими фізичними параметрами цих пристроїв (яскравість екрана, його висота і кут нахилу, відблиски та мерехтіння, шум) [22].
Для ілюстрації інтенсивності захворюваності осіб, що використовують ВДТ, наведемо дані, одержані в Інституті медицини праці АМН України. Була вивчена захворюваність користувачів ВДТ з різною тривалістю його використання. Розглядалися три групи користувачів: у першу увійшли системні інженери-програмісти (тривалість роботи за ВДТ більше 6 год на день), у другу - інженери-економісти, що займаються експлуатацією створеного програмного забезпечення (тривалість роботи від 4 до 6 год), у третю – математики-постановники завдань, які використовували ВДТ не більше як 2 год на день.
Суб'єктивні розлади у працюючих з ВДТ найчастіше (96%) проявлялись у вигляді таких симптомів: загальна втома, головний біль, роздратування та втома очей (біль, печія, свербіж, мерехтіння та пелена перед очима наприкінці робочого дня). Відсоток осіб з виявленою передпатологією різних органів та систем наростав у міру збільшення тривалості роботи протягом робочого дня. Дані про захворюваність користувачів ВДТ (з різною тривалістю роботи) та контрольної групи наведено у таблиці 9.1. Так, здорових серед обстежених користувачів ВДТ було у кілька разів менше, ніж у першій групі [22].
Таблиця 9.1 - Рівень захворюваності, %, осіб, тривалість використання ВДТ у яких була різною
| Стан здоров’я |
Користувачі ВДТ |
Контрольнагрупа |
||
| 1 група | 2 група | 3 група | ||
| Функціональні порушення ЦНС (астенічний синдром та ін.) | 15,6 | 8,2 | 6,3 | 2,7 |
| Хвороби системи кровообігу | 57,7 | 60,3 | 29,2 | 23,0 |
| Хвороби верхніх дихальних шляхів та бронхів | 20,0 | 21,7 | 11,2 | 4,1 |
| Хвороби органів травлення | 40,0 | 38,6 | 29,8 | 18,9 |
| Здорові | 6,7 | 20,1 | 29,8 | 46,6 |
Основне місце займали хвороби серцево-судинної системи. Звертає увагу підвищений рівень захворюваності осіб першої і другої груп, які інтенсивніше використовували ВДТ. Аналогічна залежність спостерігається у користувачів, у яких виявлена нейроциркуляторна дистонія з гіпертензивною спрямованістю судинних реакцій.
Друге місце за частотою займали захворювання органів травлення: у першій та другій групах вони становили відповідно 40,0 та 38,6%, у третій — 29,8%. Частіше за інші форми відзначені хронічні гастрити та холецистити. Причому якої-небудь залежності частоти появи цих захворювань від умов праці обстежених не встановлено.
Необхідно визнати, що працюючі на ЕОМ належать до групи, на яку впливають стресогенні фактори. Тому нерідко нейроциркуляторна дистонія, що розвивається у них, може розглядатися як виробниче зумовлене захворювання. Такі користувачі ВДТ повинні бути на диспансерному обліку.
З метою попередження виражених гіпертензивних станів необхідні раціоналізація трудового процесу (поліпшення умов і режимів праці та відпочинку), проведення виробничої гімнастики та інші оздоровчі заходи. Особливу увагу слід приділити ергономічності робочого місця. Про ефективність таких заходів свідчать результати вітчизняних та закордонних досліджень.
10. Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом в умовах дії іонізуючих та електромагнітних випромінювань
10.1 Дія іонізуючих випромінювань та електромагнітного імпульсу на радіоелектронні системи
Дія радіації на матеріали і деталі апаратури залежить від виду випромінювання, дози радіації, природи випромінюваної речовини та умов навколишнього середовища.
В радіоелектронній апаратурі (РЕА) використовуються елементи, до складу яких входять матеріали: метали, неорганічні матеріали, напівпровідники та різні органічні сполуки (діелектрики, смоли та ін.). Серед цих матеріалів метали найбільш чутливі до радіації, оскільки їм властива висока концентрація вільних носіїв [24].
В радіоелектронній апаратурі радіація викликає оборотні і необоротні процеси, внаслідок яких можуть бути порушення роботи елементів схеми, що приведе до пошкодження апаратури.
Якщо потік гамма-опромінення проходить через елементи РЕА, то в них виникають вільні носії електричних зарядів, внаслідок переміщення яких виникає хибний імпульс, який може призвести до включення пристрою.
Найбільш чутливі до дії радіації напівпровідники, оптичні прилади і фотоматеріали.
В елементній базі РЕА внаслідок дії іонізуючого випромінювання можлива зміна майже всіх електричних та експлуатаційних характеристик, залежних від проходження процесів іонізації і порушення структури матеріалів.
Практика експлуатації РЕА в умовах дії радіоактивних випромінювань дає можливість зробити висновки:
а) РЕА може раптово втратити працездатність при критичних рівнях радіації;
б) в елементах схем РЕА можуть початись оборотні і необоротні процеси через деякий час після випадання радіоактивних опадів при рівнях радіації значно
нижчих критичних, тобто [23]
![]() . (10.1)
. (10.1)
Для інженерної практики найбільший інтерес має перший випадок, тобто оцінка стійкості роботи РЕА при знаходженні її на зараженій радіоактивними речовинами місцевості тривалістю однієї години після випадання радіоактивних речовин на даній місцевості.
Одним із вражаючих факторів також є електромагнітний імпульс (ЕМІ) – потужний короткий імпульс, що вражає головним чином електронну апаратуру. Виникає ЕМІ в основному в результаті взаємодії гамма-випромінення, що утворюються під час вибуху, з атомами навколишнього середовища.
Основні параметри ЕМІ, що визначають вражаючу дію, є характер зміни напруженості електричного та магнітного полів в часі – форма імпульсу і максимальна напруженість поля – амплітуда імпульсу.
Діапазон частот електромагнітних імпульсів (ЕМІ) до 100 МГц, але в основному його енергія розподілена біля середньої частоти (10 – 15 кГц).
10.2 Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом в умовах дії іонізуючих випромінювань
Приведемо перелік основних елементів, від яких залежить робота комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом та визначимо з довідника експозиційні дози Ді, при яких в елементах можуть виникнути зворотні зміни. Дані занесемо до таблиці 10.1.
Таблиця 10.1 – Максимально допустимі експозиційні дози РЕА
Елементи радіоапаратури і матеріали |
Ді, Р |
| Транзистори, діоди загального призначення |
104 … 106 |
| Мікросхеми |
105 |
| Інтегральні схеми |
5 · 105 |
| Конденсатори |
107…109 |
| Резистори |
107…109 |
| Кварц |
1010 |
Проаналізувавши дані, визначається межа стійкості Дгр, яка дорівнює мінімальному значенню експозиційної дози Ді роботи РЕА:
Дгр=104 (Р).
Визначаємо можливу дозу опромінення Дм за формулою:
 , (10.2)
, (10.2)
де: р1max – максимальне значення рівня радіації;
Кпосл – коефіцієнт послаблення радіації;
tn – час початку опромінення;
tk – час кінця опромінення.
Відомо, що максимальне значення рівня радіації р1max, яке очікується на об’єкті дорівнює 4 (Р / год), коефіцієнт послаблення радіації Кпосл = 7, час початку опромінення tn = 1 (год), а кінцевий час спрацювання мікросхеми на відмову приймаємо рівним 10 років, або 87600 годинам. Отже, при таких умовах можлива доза опромінення буде дорівнювати:
![]() .
.
Допустимий час роботи РЕА в заданих умовах можна визначити за допомогою виразу [23]:
 . (10.3)
. (10.3)
Оскільки всі значення відомі, то допустимий час роботи РЕА буде таким:

Провівши розрахунки можна зробити висновок, що в умовах дії іонізуючих випромінювань комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом буде стійкою до радіації, тому що граничне значення експозиційної дози 104 (Р) більше за можливе значення 0,34 · 103 (Р):
Дгр > Дм. (10.4)
Отже, проводити заходи щодо підвищення стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з
газомагнітним підвісом непотрібно, тому що система стійка до іонізуючих випромінювань.
10.3 Оцінка стійкості роботи комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом в умовах дії електромагнітного імпульсу
За критерій стійкості роботи радіоелектронних систем або окремих їх блоків в умовах дії електромагнітного імпульсу можна прийняти коефіцієнт безпеки [23]:
![]() ,
,
де: Uд – допустиме відхилення напруги живлення;
Uв(г) – напруга наведена за рахунок дії електромагнітного імпульсу у вертикальних (горизонтальних) струмопровідних частинах.
Визначимо горизонтальну складову напруженості електромагнітного поля при дії вертикальної складової напруженості електромагнітного поля, яка дорівнює 12 (кВ / м) за формулою:
![]() .
.
Комп’ютеризовану вимірювальну систему параметрів електричних машин з газомагнітним підвісом можна розділити на такі дільниці: блок перетворення, блок передачі.
Визначимо максимальну довжину вертикальної lв та горизонтальної lг струмопровідної частини для кожного блоку. Отже:
- для блоку перетворення lг = 0,008 (м), а lв = 0,015 (м);
- для блоку передачі lг = 0,0265 (м), а lв = 0,022 (м);
Визначимо необхідні параметри у струмопровідних частинах для 2-х блоків комп’ютеризованої системи та отримані дані занесемо до таблиці 6.
Для блоку перетворення:
Uв = Ег · lв =12 · 0,015 = 0,18 (В),
Uг = Ев · lг = 12000 · 0,008 = 96 (В).
Для блоку передачі:
Uв = Ег · lв = 12 · 0,022 = 0,264 (В),
Uг = Ев · lг = 12000 · 0,0265 = 318 (В).
Визначимо допустиме коливання напруги живлення за формулою [24]:
![]() , (10.5)
, (10.5)
де: Uж – напруга живлення;
N – допустимі відхилення.
Оскільки вся система живиться від напруги 220(В) з допустимим відхиленням N = 10 %, то допустиме коливання напруги живлення буде таким:
![]() (В).
(В).
Визначимо коефіцієнти безпеки для кожного блоку окремо за формулами:
![]() , (10.6)
, (10.6)
![]() . (10.7)
. (10.7)
Визначимо коефіцієнти безпеки для кожної дільниці.
Для блоку перетворення:
![]() ,
,
![]() .
.
Для блоку передачі:
![]() ,
,
![]() .
.
Якщо ![]()
![]() 40
(дБ) і
40
(дБ) і ![]()
![]() 40
(дБ), то система стійка в роботі. А якщо
40
(дБ), то система стійка в роботі. А якщо ![]() <
40 (дБ) і
<
40 (дБ) і ![]() < 40 (дБ), або
< 40 (дБ), або ![]() < 40 (дБ), а
< 40 (дБ), а ![]()
![]() 40
(дБ), то система не стійка в роботі при цих умовах. А в стовпчику "Примітка"
запишемо – стійкий, чи нестійкий відповідний блок.
40
(дБ), то система не стійка в роботі при цих умовах. А в стовпчику "Примітка"
запишемо – стійкий, чи нестійкий відповідний блок.
Таблиця 10.2 – Результати розрахунків коефіцієнтів безпеки
| Дільниця |
Ев, В/м |
Ег, В/м |
Uд, В |
Uві, В |
Uгі, кВ |
КБві, дБ |
КБгі, дБ |
Примітка |
| Блок перетворення | 12000 | 12 | 222,2 | 0,18 | 96 | 7,29 | 61,83 | Не стійкий |
| Блок передачі | 12000 | 12 | 222,2 | 0,264 | 318 | - 3,11 | 58,5 | Не стійкий |
Провівши розрахунки відмітимо, що комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом в умовах дії електромагнітного імпульсу буде не стійкою, тому що значення коефіцієнта безпеки менше за допустимий рівень 40 (дБ). Отже необхідно розробляти заходи щодо підвищення стійкості системи. Найбільш ефективним заходом є екранування системи або її елементів.
Проведемо розрахунок екранування. Визначимо перехідне гасіння енергії електричного поля стальним екраном (А, дБ) за допомогою формули [23]:
![]() , (10.8)
, (10.8)
де Аст – перехідне гасіння для стального екрану, дБ;
t – товщина стінки екрана, м;
f – 15000 Гц.
Товщину екрану визначаємо за формулою:
![]() , (10.9)
, (10.9)
де k – коефіцієнт, що залежить від виду екрану (мідний, алюмінієвий, стальний);
Аекр – затухання в екрані і визначається як:
![]() . (10.10)
. (10.10)
Проводимо розрахунки, при цьому Кб приймемо 45 дБ для того, щоб виконувалась умова (10.8), і отримані дані заносимо до таблиці 10.3.
При наступному розрахунку вертикальна (горизонтальна) складова напруженості електричного поля на виході екрана Еві визначається за допомогою виразу:
 , (10.11)
, (10.11)
 , (10.12)
, (10.12)
Таблиця 10.3 Розрахунок екранування дільниць
| Дільниця |
Аекр.г, дБ |
Аекр.в, дБ |
tг, см |
tв , см |
КБві дБ |
КБгі, дБ |
Примітка |
| Блок перетворення | 62,2 | 7,7 | 0,098 | 0,012 | 97,3 | 45 | Стійкий |
| Блок передачі | 72,6 | 11,1 | 0,11 | 0,017 | 106,8 | 45 | Стійкий |
Як видно з результатів розрахунку які приведені в таблиці 10.3, після проведення екранування всі блоки стійкі до дії ЕМІ.
Приймачі енергії ЕМІ – тіла, що проводять електричний струм: всі повітряні і підземні лінії зв’язку, лінії управління, сигналізації, електропередачі, металеві опори, повітряні і підземні антенні пристрої, наземні і підземні трубопроводи, металеві дахи та інші конструкції, що виготовленні з металу. В момент вибуху в них на долі секунди виникає імпульс електричного струму і з’являється різниця потенціалу відносно землі [24]. Під дією цих напруг може відбуватись: пробій ізоляції кабелів, пошкодження вхідних елементів апаратури, що підключені до антен, повітряними і підземними лініями (пробій трансформаторів зв’язку, вихід з ладу розрядників, запобіжників, пошкодження напівпровідникових приладів і т. д.), а також вигорання плавких вставок включених в лінії для захисту апаратури. Найбільшу небезпеку ЕМІ представляє для апаратури не обладнаної спеціальним захистом.
Висновки
В даному дипломному проекті розроблено комп’ютеризовану вимірювальну систему параметрів електричних машин з газомагнітним підвісом.
Під час його виконання було здійснено синтез форми прорізі первинного тахометричного перетворювача, що забезпечує його низькочастотний вихідний сигнал та обумовлює кращі, у порівнянні з існуючими аналогами, частотні властивості. Розроблено конструкцію первинного тахометричного перетворювача з низькочастотним вихідним сигналом.
Розроблено пристрій введення вимірювальної інформації до оперативного запам’ятовуючого пристрою комп’ютера, який включає в себе аналого-цифровий перетворювач, порт введення-виведення.
Розроблено схему роботи та програмне забезпечення вимірювання кутової швидкості та куту повороту валу об’єкту досліджень в динамічному режимі.
Також розраховано економічну ефективність від впровадження пристрою у виробництво та розглянуті питання охорони праці і цивільної оборони. На основі порівняння пристрою з існуючими аналогами доведено його перевагу над ними.
Розроблений пристрій та первинний тахометричний перетворювач мають широкі межі застосування. Тахометричний перетворювач має безперервний аналоговий вихідний сигнал, прямо пропорційний куту повороту, що дозволяє шляхом диференціювання (аналогового чи цифрового) отримувати вимірювальну інформацію про кутову швидкість.
Список літератури
1. Красковский Е.Я. Трение в подшипниках // Опоры осей и валов машин и приборов. – Л.: Машиностроение, 1970. – С.209-233.
2. Пинегин С.В., Орлов А.В., Табачников Ю.Б. Прецизионные опоры качения и опоры с газовой смазкой. – М.: Машиностроение, 1984. – 216 c.
3. Пинегин С.В., Табачников Ю.Б., Сипенков И.Е. Статические и динамические характеристики газостатических опор. – М.: Наука, 1982. – 265
4. Галкин В.И. Магнитный подвес роторов высокоскоростных электродвигателей: Дис… канд. техн. наук: – М.: МЭИ, 1974. – 115 с.
5. Разработка макета электроверетена ЭВВ-03-ПЦВ-24 с магнитными опорами для машин химических волокон: Отчет о НИР / Рук. Журавлев Ю.Н.; ЛПИ им. Калинина. – № ГР 81022002.– Ленинград-Псков, 1983. – 89 с.
6. Braunbeck W. Freischwebende Korper in elektrischen und magnetischen Feld // Zeitschrift fur Physik. - 1939. - Bd 112. - S. 753-763.
7. Вышков Ю.Д., Иванов В.И. Магнитные опоры в автоматике. – М.: Энергия, 1978. – 160 с.
8. Лапидус А.С. и др. Система магнитной разгрузки опор скольжения // Вестник машиностроения. – 1991. – № 2. – C. 22-25.
9. Внутришлифовальный шпиндель на воздушных подшипниках // Экспресс–информация. Автоматические линии и металлорежущие станки.– М.: ВИНИТИ. – 1981.– № 22.
10. Спицын Н.А., Машнев М.М. Высококачественные подшипники качения // Опоры осей и валов машин и приборов. – Л.: Машиностроение. – 1970. – С. 265.
11. Шнайдер А.Г., Сокол В.М. Сравнительные характеристики бесконтактных опор для электромашиностроения // Вестник машиностроения. – 1987. – № 7. – C. 18-22.
12. Шнайдер А.Г. Теория и проектирование механизмов текстильных машин с мотор подшипниками: Дис… докт. техн. наук: – М.: МТИ, 1991. – 610 с.
13. Моисеев В.С. Системное проектирование преобразователей информации. – Л.: Машиностроение, 1982. – 255 с.
14. Федорков Б.Г., Телец В.А. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. – М.: Энергоатомиздат, 1990. – 320 с.
15. Высокопроизводительные преобразователи формы информации / А.И.Кондалев, В.А.Багацкий, В.А.Романов, В.А.Фабричев. – К.: Наук. думка, 1987. – 280 с.
16. Интегральные микросхемы: Микросхемы для аналого-цифрового преобразования и средств мультимедиа. Выпуск 2 – М.: ДОДЭКА, 1996. – 384 с.
17. Оптимальні системи керування електроприводами / Б.І.Кузнєцов, І.М.Богаєнко, М.О.Рюмшин та інш / за ред. Б.І.Кузнєцова, І.М.Богаєнко. – К.: Вища школа,1995.– 210 с.
18. Копылов И.П. Математическое моделирование электрических машин. – М.: Высш. шк., 1987.
19. ГОСТ 11828-86. Машины электрические вращающиеся: общие методы испытаний. – М.: Изд-во стандартов, 1986. – 42 с.
20. Потапов Л.А., Зотин В.Ф. Испытание микроэлектродвигателей в переходных режимах. – М.: Энергоатомиздат, 1986.
21. Техніко-економічне обґрунтування та економічні розрахунки в дипломних проектах: Методичні вказівки для студентів технічних спеціальностей факультетів: ФАКСУ, ФФЕЛТ, ФКСМ, ФКІ, ФМБЕП, ФРТТК / В.О. Козловський. – Вінниця: ВДТУ, 2002. – 66 с.
22. Навакатікян О.О., Кальншин В.В., Стрюков С.М. Охорона праці користувачів комп’ютерних відеодисплейних терміналів. – К., 1997. – 400 с.
23. Основи розробки питань цивільної оборони в дипломних проектах: Навчальний посібник / В.Ф. Сакевич. – Вінниця: ВДТУ, 2001. – 108 с..
24. Атаманюк В.Г., Ширшев Л.Г., Акимов Н.И. .Гражданская оборона. - М.: Высшая школа, 1986. – 207 с.
ДОДАТКИ
Додаток А
(обов’язковий)
Вінницький державний технічний університет
ЗАТВЕРДЖУЮ
Зав. кафедри МПА ВДТУ,
д. т. н., професор
___________В.О.Поджаренко
"___" ____________ 2002 р.
ТЕХНІЧНЕ ЗАВДАННЯ
на дипломне проектування
КОМП’ЮТЕРИЗОВАНА ВИМІРЮВАЛЬНА СИСТЕМА ПАРАМЕТРІВ ЕЛЕКТРИЧНИХ МАШИН З ГАЗОМАГНІТНИМ ПІДВІСОМ
08 – 03. ДП. 003. 00. 000 ТЗ
Керівник проекту
к. т. н., доцент кафедри МПА ВДТУ
____________ П.І. Кулаков
Виконавець: ст. гр. 1АМ – 97
____________В.І. Козловський
Вінниця ВДТУ 2002
1 Підстава для проведення робіт
Підставою для виконання дипломного проекту на тему: "Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом" є наказ ректора.
Термін виконання робіт:
початок 02. 04. 2002
кінець 17. 06. 2002
2 Мета та вихідні дані для проведення робіт
Метою роботи є розробка апаратних засобів, алгоритмічного і програмного забезпечення комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом.
Вихідними даними для проведення робіт є індивідуальне завдання на дипломний проект від 02. 04. 2002 р.
3 Етапи виконання робіт
Виконавцем всіх перерахованих в даному розділі етапів є: студент групи 1АМ – 97 факультету автоматики та комп’ютерних систем управління Вінницького державного технічного університету, а замовником є кафедра метрології та промислової автоматики.
Таблиця А.1 – Етапи виконання робіт
| № Етапу |
Зміст етапу |
Строки виконання |
| Е1 | Огляд відомих технічних рішень, техніко-економічне обґрунтування доцільності проекту. Вибір напрямку та задач проектування. |
10. 01. 2002 – 10. 03. 2002 |
| Е2 | Розроблення узагальнених структурних схем, алгоритмів, обґрунтування вибору способу вимірювання параметрів електричних машин з газомагнітним підвісом. |
10. 03. 2002 – 30. 03. 2002 |
| Е3 | Розробка схеми електричної функціональної, оцінка метрологічних характеристик засобів вимірювань. |
30. 03. 2002 – 20. 04. 2002 |
| Е4 | Розробка схеми електричної принципової, електричний розрахунок, розробка алгоритмічного та програмного забезпечення. |
20. 04. 2002 – 05. 05. 2002 |
| Е5 | Пророблення питань економічної ефективності проекту та аналіз безпеки життєдіяльності. Пророблення питань цивільної оборони. |
05. 05. 2002 – 30. 05. 2002 |
4 Призначення і галузь застосування
Дана система здійснює вимірювання середньої та миттєвої кутової швидкості обертання ротора, приведеного моменту інерції роторної системи, амплітуди крутильних коливань. Процесом вимірювання, обробки і передавання результатів управляє програмне забезпечення персонального комп’ютера (ПК).
Система призначена для використання в науково-дослідних лабораторіях а також для проведення автоматизованих випробувань безконтактних електричних машин при промисловому виробництві та поточному контролі кутової швидкості, приведеного моменту інерції роторної системи і крутильних коливань.
Систему передбачається використовувати при температурі від плюс 10˚С до плюс 40˚С, максимальній вологості повітря 90 %.
5 Склад системи
Система складається із таких частин:
- первинний вимірювальний перетворювач
- пристрій аналого-цифрового перетворення та спряження з ПЕОМ через шину ЕІSA;
- персональний комп’ютер.
6 Технічні вимоги
6.1 Вимірювані параметри : середня кутова швидкість, миттєва кутова швидкість, приведений момент інерції, амплітуда крутильних коливань.
6.2 Введення даних в комп’ютер через шину EISA
6.3 Зведені похибки вимірювання:
- середнього значення кутової швидкості – 1%;
- миттєвого значення кутової швидкості – 5%;
- приведеного моменту інерції –10 %;
- амплітуди крутильних коливань – 7 %;
- нижня межа вимірювань середнього і миттєвого значення кутової швидкості – 10 рад/с;
- верхня межа вимірювань середнього і миттєвого значення кутової швидкості – 6500 рад/с;
- нижня межа вимірювання приведеного моменту інерції – 10-3 Н м;
- верхня межа вимірювання приведеного моменту інерції – 10-2 Н м;
- нижня межа вимірювання амплітуди крутильних коливань – 10-5 рад;
- верхня межа вимірювання амплітуди крутильних коливань – 2 10-4 рад;
- відстань від первинного вимірювального перетворювача до комп’ютера – не більше 2 м.
7 Вимоги до надійності
7.1 Середній час безвідмовної роботи – 10000 год.
7.2 Строк служби – 8 років.
8 Живлення системи
8.1 Система живиться від мережі – 220 В частотою 50 Гц.
8.2 Напруга живлення 220![]() В
В
8.3 Частота промислової мережі
50 ![]() 0.5 Гц
0.5 Гц![]()
9 Умови експлуатації
9.1 Температура навколишнього середовища від плюс 10˚С до плюс 40˚С.
9.2 Максимальна вологість повітря 90 % при температурі плюс 30˚С.
9.3 Тиск повітря від 84 до 102 кПа.
9.5 Агресивне середовище повинно бути відсутнім.
9.6 Вібрації (f = 25 Гц, амплітуда 0.1 )
10 Вимоги до конструкції
КВС має складатися з таких конструктивно закінчених блоків:
- первинний вимірювальний перетворювач;
- АЦП і блок спряження;
- персональний комп’ютер.
11 Умови транспортування та зберігання
11.1 Транспортування системи повинно здійснюватись в тарі, яка забезпечує зберігання її технічних характеристик.
11.2 Умови транспортування:
11.2.1 Температура навколишнього середовища від мінус 20˚С до плюс 40˚С.
11.2.2 Максимальна вологість повітря 80 % при температурі плюс 30˚С.
11.3 Умови зберігання:
11.3.1 Температура зберігання від мінус 20˚С до плюс 40˚С.
11.3.2 Вологість повітря при зберіганні 85 %, при температурі плюс 30˚С.
Додаток Б
(обов’язковий)
Фрагмент програми вимірювання та контролю моменту інерції
uses Crt;
Function Init_port : boolean;
Function Start_Measurements : boolean;
Function Strobe_Imp : boolean;
Function ACP(num_channel : byte; DelayVarComm: word):word;
Procedure NextECGMode(SoundOn : boolean); Procedure ProgramRight(SoundOn : boolean);
Procedure ProgramLeft(SoundOn : boolean);
Procedure Speedgraph1Reset(SoundOn : boolean);
Procedure Speedgraph2Reset(SoundOn : boolean);
Procedure Speedgraph3Reset( SoundOn : boolean);
var NNN : byte;
implementation
function Init_port : boolean; begin
port[$103]:=$92;
Init_port := true; end; {Init_port}
function Start_measurements : boolean; begin
Start_measurements:=false;
repeat
delay(10);
if keypressed then if readkey=#27 then exit;
until (port[$101] and $08)=$08;
repeat
delay(10);
if keypressed then if readkey=#27 then exit;
until (port[$101] and $08)=$00;
repeat
delay(5);
if keypressed then if readkey=#27 then exit;
until (port[$101] and $08)=$08;
Start_measurements := true; end; {Start_measurements}
function Strobe_imp : boolean; begin
Strobe_imp := false;
if (port[$101] and $08)=$00 then exit;
if (port[$101] and $08)=$08 then
repeat
delay(10);
until ( port[$101] and $08 = $00 ) or KeyPressed;
Strobe_imp := true; end; {Strobe_imp}
Procedure ProgramRight(SoundOn : boolean); begin
if SoundOn then sound(3500);
port[$102] := $11;
delay(30);
nosound;
port[$102] := $01;
delay(30);
inc(NNN); end; {ProgramRight}
Procedure ProgramLeft(SoundOn : boolean); begin
if SoundOn then sound(4500);
port[$102] := $21;
delay(30);
nosound;
port[$102] := $01;
delay(130);
if NNN > 0 then dec(NNN); end; {ProgramLeft}
Procedure NextECGMode( SoundOn : boolean );
begin
if SoundOn then sound(6000);
port[$102] := $11; {вкл}
delay(15);
nosound;
port[$102] := $01; {выкл}
delay(500);
inc(NNN); if NNN > 4 then NNN := NNN-5; end; {NextECGMode}
Procedure Speedgraph1Reset( SoundOn : boolean ); begin
if NNN <> 0 then
repeat
NextECGMode( SoundOn );
until NNN = 0; end;
Procedure Speedgraph2Reset(SoundOn : boolean); var i : byte; begin
for i := 1 to 6 do ProgramLeft(SoundOn); end;
Procedure Speedgraph3Reset( SoundOn : boolean );
begin
if NNN <> 1 then
repeat
NextECGMode( SoundOn );
until NNN = 1; end; {Speedgraph3Reset}
function ACP( num_channel : byte; DelayVarComm : word) : word; var my_word, i : word;
ErrCount : word;
masc : byte; begin {$IFNDEF FullRegime}
for ErrCount :=1 to DelayVarComm do;
ACP := random(10 * num_channel ); exit; {$ENDIF}
ErrCount := 0; ACP := 512;
port[$102]:=$01 or ( $07 shl 1 ); { снять пуск АЦП }
repeat
inc(ErrCount);
until ( port[$101] and $04 = $04 ) or ( ErrCount > 1000 ) or KeyPressed;
if num_channel > 6 then begin
masc := $80; dec(num_channel,7);
end else begin masc := 00; dec(num_channel,0); end;
port[$102]:= $01 or ( num_channel shl 1 ) or masc;
for ErrCount :=1 to DelayVarComm do;
port[$102]:= $00 or ( num_channel shl 1 ) or masc;
ErrCount := 0;
repeat
inc(ErrCount);
until ( port[$101] and $04 = $00 ) or ( ErrCount > 1000 ) or KeyPressed;
ACP := port[$100]+$100*(port[$101] and $03); end; {ACP}
(* function ACP(num_channel : byte; DelayVarComm : word) : word; var my_word, i , ErrCount : word;
ACP0, ACP1 : integer; begin
ErrCount := 0; ACP := 512;
if num_channel = 12 then num_channel := $07 else
if num_channel > 6 then begin
num_channel := ((num_channel - 6) shl 3) or $06;
end;
num_channel := num_channel shl 2;
port[$102]:=$01 or $07;
repeat
inc(ErrCount);
until ( port[$101] and $04 = $04 ) or ( ErrCount > 1000 ) or KeyPressed;
port[$102]:= $01 or num_channel;
for ErrCount :=1 to DelayVarComm do;
port[$102]:= $00 or num_channel; ErrCount := 0;
repeat
inc(ErrCount);
until(port[$101]and $04=$00)or (ErrCount>1000)or KeyPressed;
ACP0 := port[$100]+$100*(port[$101] and $03);
port[$102]:=$03 or $07;
repeat
inc(ErrCount);
until ( port[$101] and $04 = $04 ) or ( ErrCount > 1000 ) or KeyPressed;
port[$102]:= $03 or num_channel;
for ErrCount :=1 to DelayVarComm do;
port[$102]:= $02 or num_channel;
ErrCount := 0;
repeat
inc(ErrCount);
until (port[$101]and $04=$00)or(ErrCount>1000)or KeyPressed;
ACP1 := port[$100]+$100*(port[$101] and $03); { ACP := ((ACP0-ACP1+512) shr 1);
ACP := 1024-ACP1; end; } begin NNN := 0;
for Index := 1 to NumDeriv do
begin
gotoxy(1, wherey); write(Index);
Location := 1;
for Term := 1 to NumPoints-1 do
if XDeriv[Index] > XData[Term] then Location := Term;
X := XDeriv[Index] - XData[Location];
with Spline do { Approximate first derivative }
YDeriv[Index]:=(3*D[Location]*X+2*C[Location])*X+ B[Location];
end; end;
end.